
| Главная |
| Поиск по сайту |
Адрес этой страницы' ?>
Оглавление книги Предыдущая Следующая
Контурные системы ЧПУ. Характеристика электрогидравлического шагового привода Э32718-2.
Структурные схемы контурных систем управления показаны на рис. 51.
Разомкнутая система управления с шаговым двигателем представлена на рис. 51, а. Шаговым двигателем является двигатель с импульсным питанием. При поступлении на вход одного импульса ротор двигателя переворачивается на определенный фиксированный угол α=0,5°; 1,0°; 1,5°; 2,0°; 3,0°...
Этот двигатель можно рассматривать как преобразователь импульс-аналог. Суммарный угол поворота ротора определяется числим импульсов, поданных на вход двигателя, а скорость ротора зависит от частоты следования импульсов.
Технические характеристики шаговых двигателей даны в табл. 30.
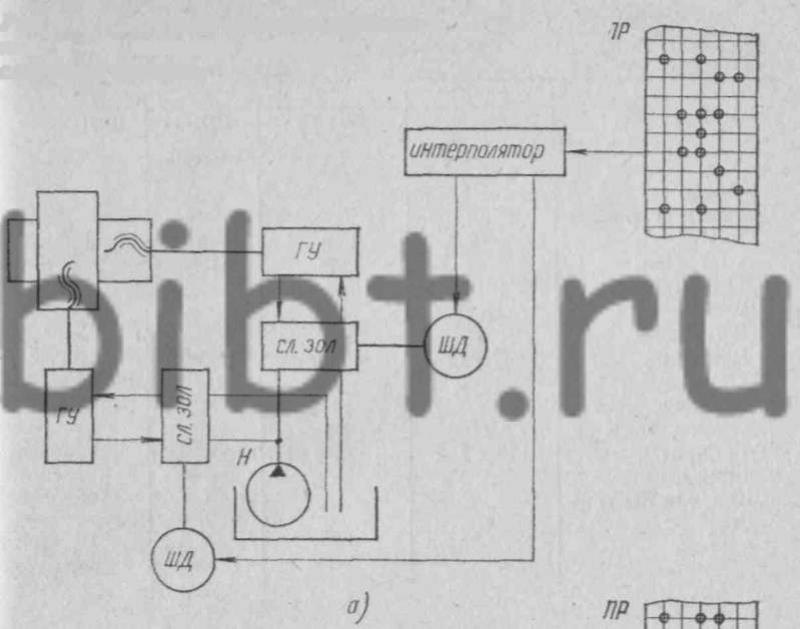
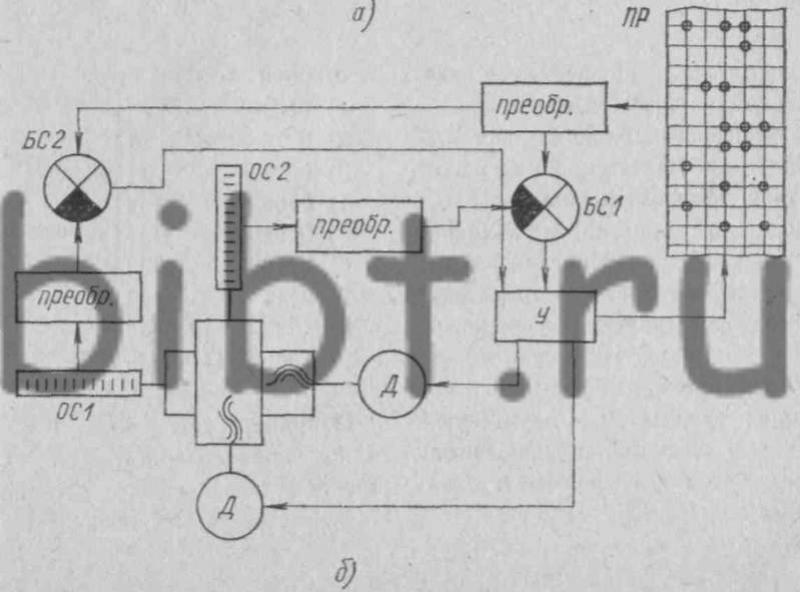
Рис. 51. Контурные системы управления: а — с шаговым двигателем, б — следящие системы
Таблица 30 Характеристики шаговых двигателей
| Показатели | ШД-6 | ШД-1Б | ШД-4 | ШД-5 |
| Число тактов схемы управления | 8 | 6 | 6 | 6 |
| Шаг, град | 3 | 3 | 1,5 | 1,5 |
| Приемистость, имп./мин | 1600 | 800 | 800 | 1300 |
| Крутящий момент, кгм | 0,025 | 0,025 | 0,025 | 0,008 |
| Напряжение питания постоянного тока, в | 24 | 24 | 24 | 24 |
| Габариты, мм | 115x140 | 102X140 | 102x140 | 75x65 |
| Масса, кг | 6,2 | 4,6 | 4,7 | 0,6 |
| Ток при 800 Гц,А | 4,5 | 3 | 3 | 2,5 |
Мощность шаговых двигателей недостаточна для привода исполнительных органов станков, поэтому шаговый двигатель управляет следящим золотником, а последний при помощи гидроусилителя крутящих моментов осуществляет привод исполнительного органа (табл. 31). Таким образом, подача производится от достаточно мощного привода, но управляют этим приводом шаговый двигатель и следящий золотник в соответствии с информацией, записанной на перфоленте.
Таблица 31 Характеристика электрогидравлического шагового привода Э32718-2
Показатели |
Типо размер | |||
| Э32Г18 - 22 | Э32Г18-23 | Э32Г18- 24 | Э32Г18- 25 | |
Номинальное рабочее давление, кПа |
6200 |
6200 |
6200 |
6200 |
Номинальный крутящий момент, Нм |
11 |
22 |
46 |
92 |
Расход масла при наибольшей частоте вращения, г |
40 |
80 |
80 |
160 |
Наибольшее число импульсов, имп./мин |
8000 |
8000 |
4000 |
4000 |
Наибольшая частота вращения, об/мин |
2000 |
2000 |
1000 |
1000 |
Наибольшая мощность, кВт |
2,2 |
4,4 |
4,6 |
9,2 |
Статистическая неточность при нагрузке 0,7 номинального момента, град |
±1,2 |
±1,2 |
±1,2 |
±1,2 |
Важнейшим блоком системы управления является интерполятор. Информация на программоносителе записана в кодовой форме, для управления шаговым двигателем требуется импульсная форма представления управляющей информации. Интерполятор — преобразователь информации из кодовой формы в импульсную.
В качестве примера приведены десять чисел в двоичном и унитарном коде:
0) 0000— 0
1) 0001— 1
2) 0010— 11
3) 0011— 111
4) 0100— 1111
5) 0101— 11111
6) 0110— 111111
7) 0111— 1111111
8) 1000— 11111111
9) 1001 — 111111111
Например, число 6425 в унитарном коде содержит 6425 в единичных импульсных сигналов. Импульсный сигнал поступает на вход шагового двигателя, который отрабатывает заданное перемещение. Система разомкнутая, узел обратной связи отсутствует. Чтобы повысить точность отработки перемещения, используются шариковые винтовые пары.
Рис. 52. Гидроусилитель крутящих моментов
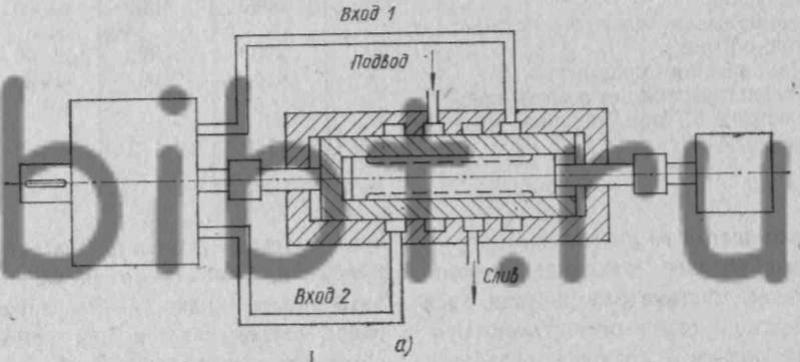



Гидроусилитель крутящих моментов состоит из гидродвигателя и управляющего золотника (рис. 52). Выходной вал гидродвигателя соединяется с кодовым винтом станка. Частота вращения вала определяется объемом рабочей жидкости, поступающей на вход гидродвигателя.
Чтобы изменять частоту вращения, необходимо регулировать объем жидкости. Регулирование осуществляется при помощи следящего золотника. Золотник состоит из корпуса, втулки и сердечника.
Сердечник соединяют с шаговым двигателем, гидродвигатель с втулкой. В корпусе золотника имеется четыре кольцевых выточки (слева направо), вход 2, подвод, слив, вход 1.
Каждая выточка соединяется с внешней магистралью.
Магистраль «Подвод» обеспечивает подачу жидкости под давлением к золотнику;
магистраль «Слив» — сброс жидкости;
через магистраль «Вход 1» жидкость подается на вход гидродвигателя и обеспечивает его вращение в одном направлении;
через магистраль «Вход 2» жидкость подается на другой вход гидродвигателя — вал поворачивается в противоположном направлении.
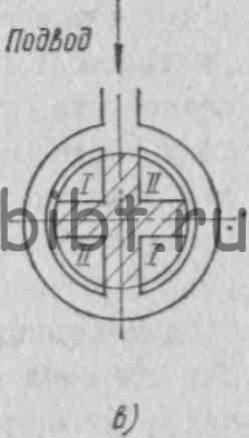
Внизу показаны сечения управляющего золотника.
Наружная окружность изображает корпус золотника, внутренняя — втулку. Сердечник имеет четыре кармана. При нулевом положении золотника выступы сердечника перекрывают подводящие каналы втулки, жидкость не поступает в гидродвигатель, выходной вал его неподвижен.
Если шаговый двигатель повернет сердечник по часовой стрелке на какой-либо угол, то масло из магистрали подвода поступает в кольцевую проточку (рис. 52,в), затем— на «Вход 1» гидродвигателя и в полость I (рис. 52,д).
Из магистрали «Вход 2» жидкость поступает в полость II (рис. 52,б), затем через соответствующую кольцевую канавку на слив (рис. 52,г). По мере поворота выходного вала в том же направлении будет поворачиваться втулка, уменьшая величину рассогласования между положением втулки и сердечника.
Когда будет отработан заданный угол, выступы сердечника снова перекроют подводящие каналы втулки, наступит положение статического равновесия, и вращение вала прекратится.
Если шаговый двигатель будет поворачивать сердечник против часовой стрелки, то жидкость из магистрали подвода поступит в полость, затем на «Вход 2» гидродвигателя — вал получит вращение против часовой стрелки, а жидкость из магистрали «Вход 2» поступит на слив.
Таким образом, в описанной системе маломощный шаговый двигатель служит для управления весьма мощным гидродвигателем. Последний воспроизводит все движения шагового двигателя по величине и направлению и сообщает соответствующие перемещения исполнительному органу станка.
Следящая контурная система ЧПУ представлена на рис. 51,б.
В последнее время разомкнутые системы с шаговыми двигателями не в полной мере удовлетворяют требованиям производства. Шаговые системы в секунду могут отработать около 700 импульсов. Это соответствует максимальной подаче (при разрешающей способности q=0,01 мм) около 400 мм/мин. Между тем современные станки с ЧПУ требуют скоростей перемещений до 10— 20 м/мин, разрешающей способности q = 0,001 мм и менее. Этим требованиям соответствуют следящие системы.
Следящая система имеет привод и обратную связь по каждой из координат. Программа записывается на перфоленте в кодовой форме. Сравнение сигналов в БС может происходить в разной форме. В связи с этим различают системы:
с импульсным выходным сигналом;
с кодовым выходным сигналом;
с фазовым выходным сигналом.
Привод движения подачи может быть электрический или электрогидравлический.
Различают типы электрического привода: постоянного тока с электромашинным, с магнитным усилителями, с управляемыми реверсивными вентильными преобразователями на тиристорах, с широтно-импульсными преобразователями; переменного тока с асинхронными двигателями, со статическими преобразователями частоты.
Типы электрогидравлического привода: с дроссельным, с объемным, с дискретным регулированием скорости.
Рис. 53. Следящая система с электрогидравлическим приводом
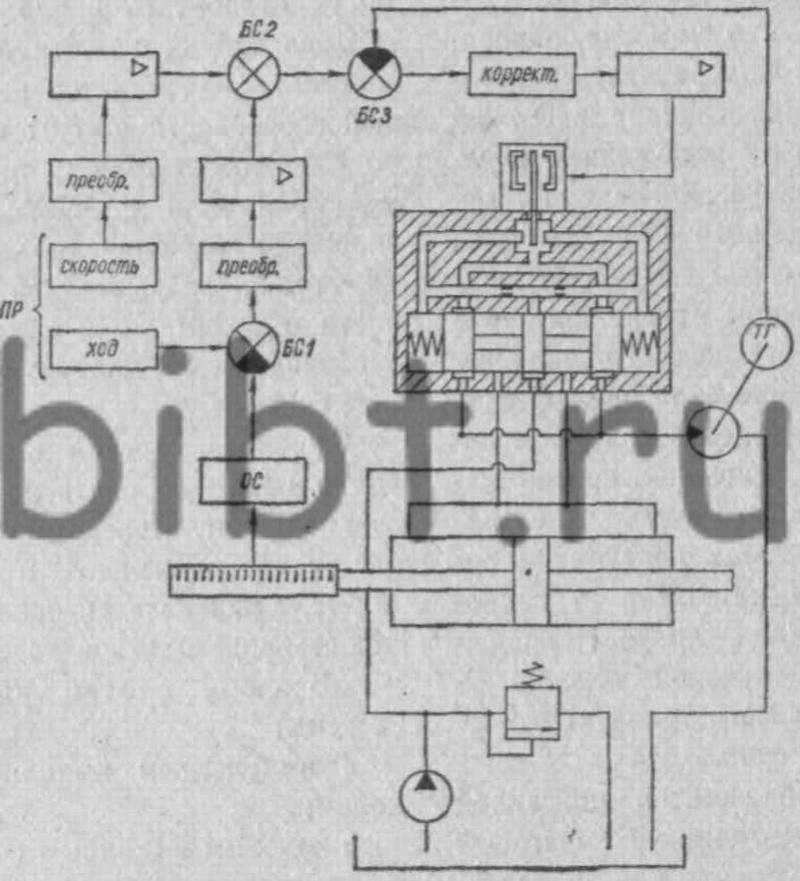
На рис. 53 показана следящая система с электрогидравлическим исполнительным приводом с дроссельным регулированием скорости.
Привод исполнительного органа осуществляется от насоса, золотника и гидроцилиндра. Управляет золотником дроссельное устройство. При нейтральном положении дроссельной заслонки золотник также находится в нейтральном положении, поршень гидроцилиндра неподвижен. При смещении заслонки вправо в правой полости золотника повышается давление, золотник смещается влево, жидкость от насоса поступает в правую полость гидроцилиндра.
Жидкость из левой полости через гидродвигатель поступает на слив. При смещении заслонки влево жидкость поступает в левую полость гидроцилиндра. На перфоленте записана величина кода и величина скорости. На блок сравнения БС2 поступает информация от датчика обратной связи ОС о том, насколько полно отработано заданное перемещение на блок сравнения БС3 —информация о скорости перемещения, заданной программой, и фактической скорости — от тахогенератора ТГ. Когда заданное перемещение будет отработано, исполнительный орган останавливается.