
| Главная |
| Поиск по сайту |
Адрес этой страницы' ?>
<<Предыдущая страница Оглавление книги Следующая страница>>Кинематическая схема координатно-расточного станка модели 2Д450.
На рис. 87 и 88 приведены кинематические схемы движения шпинделя, стола и салазок станка модели 2Д450. Характерной особенностью схем является то, что для осуществления каждого движения на станке предусматривается свой двигатель: для вращения шпинделя — двигатель 32 (рис. 87), для перемещения гильз — двигатель 16, для установочного перемещения шпиндельной коробки — двигатель 25, а для перемещения стола и салазок — два двигателя 8 (рис. 88). Зажим подвижных частей шпиндельной коробки, стола и салазок осуществляется пружинными механизмами, а разжим — пневматическими цилиндрами. Механизм зажима шпиндельной коробки 36—39—38 показан на рис. 87. Подвод воздуха к станку из заводской пневмосети на рис. 88 показан стрелкой III, подвод воздуха к цилиндру коробки— стрелкой I, а к группе стола — стрелкой II.
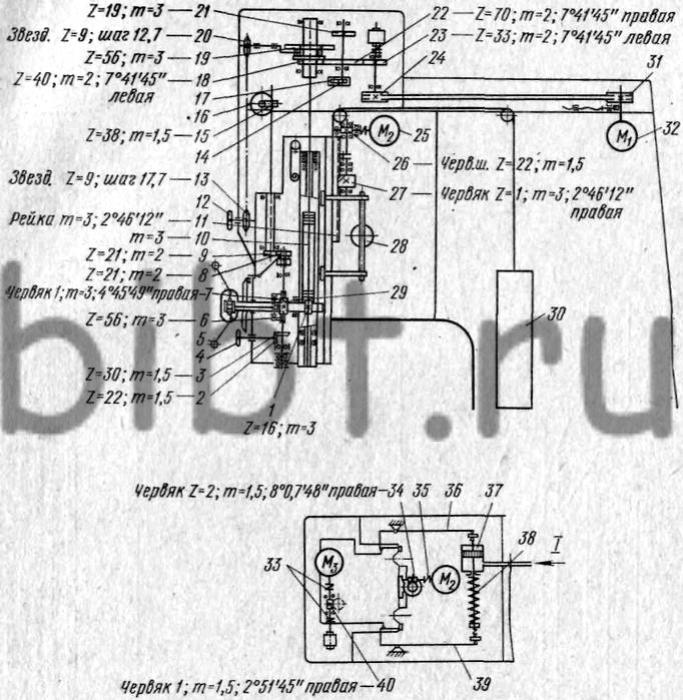
Рис. 87. Кинематическая схема механизмов движения шпинделя станка модели 2Д450:
32—31—24—23—22—18 или 32—31—24—23 — 22—21—19 — кинематическая цепь вращения шпинделя, 16—33—40—15—9—3—7—6—29—1 — кинематическая цепь подачи гильзы, 36—39—38—механизм зажима шпиндельной коробки, 28—36—39 — разжим шпиндельной коробки, 25—35—34—26—27 — 11 — кинематическая цепь перемещения шпиндельной коробки, 5 — рукоятка включения фрикциона или ручного перемещения гильзы, 12 — маховичок переключения диапазонов регулирования частоты вращения шпинделя, 13, 20 — звездочки, 30 — противовес
Движение расточного шпинделя (см. рис. 87) осуществляется от регулируемого электродвигателя постоянного тока 32 через клиноременную передачу и двухступенчатую коробку скоростей.
Двухступенчатой коробкой скоростей на станке осуществляются две ступени регулирования частоты вращения шпинделя: первая в пределах 50—400 об/мин и вторая в пределах 250—2000 об/мин. Внутри каждой ступени регулирования производится бесступенчатое изменение чисел оборотов вследствие регулирования частоты вращения вала двигателя.
На первой ступени передача движения осуществляется по следующей кинематической цепи: ведущий шкив 31, ведомый шкив 24, зубчатые колеса 23, 22, 21, 19. На второй ступени: ведущий шкив 31, ведомый шкив 24, зубчатые колеса 23, 22, 18. Требуемая частота вращения устанавливается указателем чисел оборотов шпинделя 6, расположенным на передней стенке блока направляющих (см. рис. 86). Переключение ступеней частоты вращения шпинделя производится маховичком 12 (см. рис. 87) вручную с помощью звездочек 13, 20 и цепной передачи. На одной оси со звездочкой 20 расположен эксцентрик. На ось эксцентрика посажен шарикоподшипник, располагающийся между венчиками блока зубчатых колес 19 и 18. При повороте оси эксцентрика происходит переключение зубчатых колес, т. е. осуществляется первая или вторая ступень регулирования частоты вращения шпинделя.
Вертикальная подача гильзы шпинделя осуществляется: от электродвигателя постоянного тока 16 в широких пределах регулирования. От вала двигателя движение передается с помощью муфты 33, червячной передачи 40—15, шлицевого вала, зубчатых колес 9, 8 и червяка 7 к червячному колесу 6. Червячное колесо 6 через фрикционную муфту 29 связано с валом реечной шестерни 1. При выключенной муфте 29 рукояткой 5 можно непосредственно (вручную) вращать реечную шестерню 1 и поднимать или опускать гильзу шпинделя. Контроль скорости подачи гильзы осуществляется указателем 7, расположенным на передней плоскости крышки блока направляющих (см. рис. 86). Для точных перемещений гильзы имеется маховичок 4, который через конические колеса 2 и 5 связан с валом червяка 7 и червячным колесом 6 (см. рис. 87).
Шпиндельная коробка перемещается с постоянной скоростью от асинхронного электродвигателя 25 с помощью муфты 35, червячной передачи 34—26, червяка 27 и рейки 11.
Шпиндельная коробка уравновешена противовесом 30. Зажим шпиндельной коробки на направляющих осуществляется пружиной 38 и рычагами 36 и 39. Отжим осуществляется пневмопилиндром 28 (37), воздух к которому поступает через кран управления 28 (рис. 88).
Перемещение салазок осуществляется от электродвигателя 8 с регулируемой частотой вращения или при необходимости точной установки салазок от маховичка 9 через червячную передачу 21—5, коническую передачу 4—3, короткий винт 2 и рейку 1.
Перемещения стола осуществляются от электродвигателя 8 (рис. 88) с регулируемой частотой вращения или при необходимости точной установки стола от маховичка 9 через червячную передачу 16—15, коническую передачу 20—19, винт 17 и рейку 18, закрепленную на столе. Регулированием частоты вращения электродвигателя обеспечиваются подачи стола и салазок в пределах от 30 до 300 мм/мин, ускоренное перемещение со скоростью 1500 мм/мин и постепенное снижение скорости при автоматическом подходе к заданной координате.
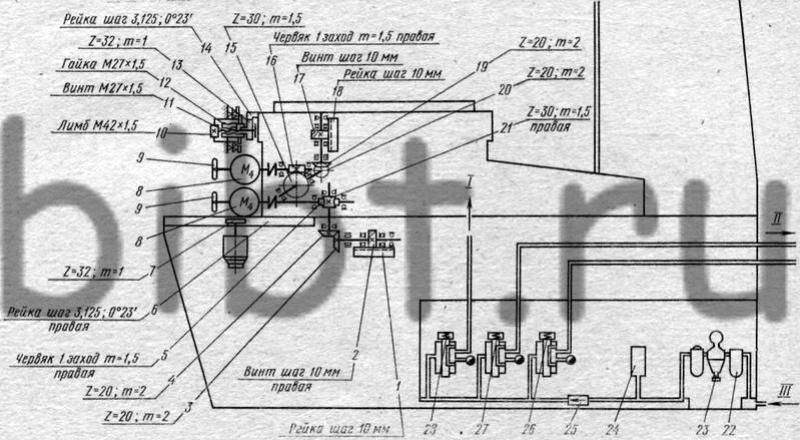
Рис. 88. Кинематическая схема механизмов движения стола и салазок станка модели 2Д450:
8—16—15—20—19—17—18 — кинематическая цепь движения стола, 8—5—21—4—3—2—1 — кинематическая цепь движения салазок, 13—7 — зубчатые колеса механизма предварительного набора координат, 14—6 — рейки механизма предварительного набора координат, 9 — маховичок ручного управления, 10 — лимб с кулачками, 11 — винт механизма, 12 — гайка, 22 — влагоотделитель, 23 — регулятор давления воздуха, 24 — реле давления, 25 — обратный клапан, 26 — кран управления механизмом зажима шпиндельной коробки, 27—28 — краны управления механизмом зажима стола и салазок
Стол и салазки (рис. 88) находятся в зажатом состоянии и разжимаются только перед началом перемещения. Разжим может произойти автоматически при повороте регулятора, включающего движение стола или салазок, или от отдельной кнопки. Для разжима используется сжатый воздух, поступающий из пневмосети через краны управления 26 и 27 к цилиндрам механизмов зажима стола и салазок. Давление воздуха регулируется регулятором 23. Реле давления 24 отрегулировано на минимальное давление 3,5 кгс/см2. В сети имеется влагоотделитель 22. Обратный клапан 25 предотвращает самопроизвольный зажим перемещающихся органов при падении давления в пневмосети.
Устройства предварительного набора координат у стола и салазок аналогичны. Зубчатое колесо 13 или 7, получив вращение от рейки 14 или 6, закрепленных на столе или салазках, вращает гайку 12, которая одновременно перемещается вдоль винта 11 При отработке координат вместе с гайкой 12 вращается и перемещается лимб 10 с кулачками, которые при подходе к заданной координате вначале дают команду на снижение скорости движения стола (салазок), а затем на полный останов перемещаемого узла. При наборе координат лимб 10 с кулачками перемещается вдоль оси гайки 12.