
| Главная |
| Поиск по сайту |
Адрес этой страницы' ?>
<<Предыдущая страница Оглавление книги Следующая страница>>
§ 73. Конструктивные особенности и узлы токарных станков с ЧПУ. Патронный токарный полуавтомат с ЧПУ модели МА1750ПУ.
Токарные станки с ЧПУ, как правило, оснащаются револьверными головками или магазинами инструментов. Револьверные головки могут иметь от трех до восьми инструментов, в магазине количество инструментов может достигать 20 шт.
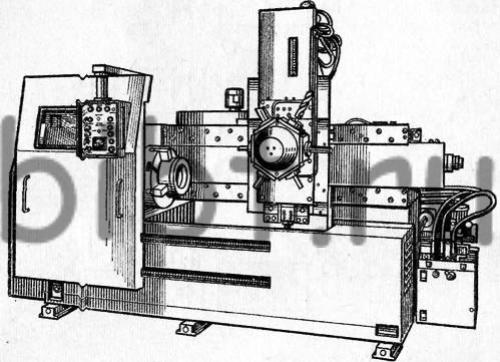
Рис. 115. Патронный токарный полуавтомат с ЧПУ модели МА1750ПУ
На рис. 115 показан токарный полуавтомат с ЧПУ модели 1750 ПУ с револьверной головкой на шесть инструментов.
Установлено, что с помощью шести различных инструментов можно выполнить до 90% всей необходимой токарной обработки разнообразных деталей. Большее количество инструментов необходимо при точении труднообрабатываемых материалов, когда инструменты имеют малый период стойкости или при частой переналадке для обработки разнотипных деталей и т. п.
Как и у станков с ручным управлением, у токарных станков с ЧПУ обрабатываемая заготовка получает вращение от шпинделя станка, а режущий инструмент закрепляется на суппорте и осуществляет формообразующие движения по двум координатным направлениям X и Z. Ось Z совпадает с направлением оси шпинделя, а ось X перпендикулярна ей.
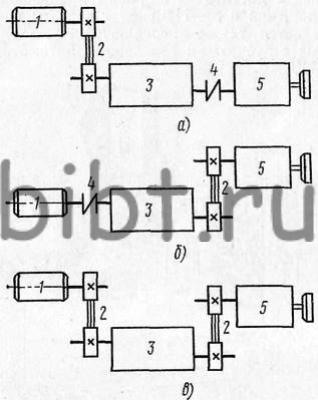
Рис. 116. Схемы построения главного привода токарных станков ЧПУ: я, б — передача движения ременной передачей и муфтой, в — только ременной передачей
Применение числового программного управления внесло изменения в конструкцию станков. В станках с ЧПУ применяют, как правило, раздельный главный привод (рис. 116). Коробка скоростей 3 отделена от шпиндельной бабки 5, которая кроме опор шпинделя может иметь одну-две передачи. В главном приводе могут быть применены асинхронный одноступенчатый электродвигатель 1, асинхронный многоступенчатый электродвигатель или постоянного тока с достаточно широким диапазоном регулирования частоты вращения и др. Изменение частоты вращения шпинделя осуществляется также переключением электромагнитных муфт, связанных с зубчатыми передачами автоматической коробки скоростей АКС.
Передача движения вращения от электродвигателя к коробке скоростей и от коробки скоростей к шпиндельной бабке может осуществляться ременной передачей 2 или упругой муфтой 4.
В станках с ЧПУ при любом конструктивном решении привода подач для перемещения рабочего органа по каждой из координат обычно предусмотрен самостоятельный привод. Для привода подач в станках с ЧПУ в основном применяются шаговые электродвигатели, электродвигатели постоянного тока, электро-гидравлические приводы, приводы с электромагнитными муфтами, шаговые электродвигатели с усилителями (рис. 117) и др.
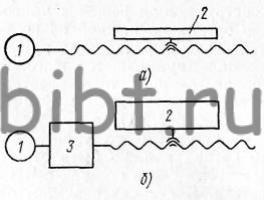
Рис. 117. Схемы приводов подач: а —с силовым шаговым электродвигателем, б — с шаговым двигателем и с усилителем вращающего момента; 1 — шаговый электродвигатель, 2 — исполнительный узел, 3 — гидромотор
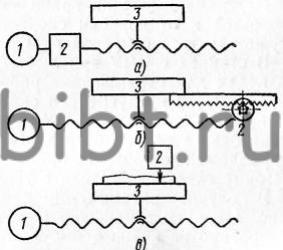
Рис. 118. Схемы управления перемещением рабочего органа:
а — разомкнутая система, б, в — замкнутая; 1 — двигатель, 2 — датчик исполнения, 3 — исполнительный узел
В случае разомкнутой системы программного управления (рис. 118, а) перемещение рабочего органа должно быть строго дозировано на каждый импульс. Для этой цели в станках с ЧПУ применяются шаговые электродвигатели. В станках с замкнутой системой программного управления (с применением обратной связи, рис. 118,б и в) движение и останов рабочего органа контролируются датчиком исполнения и регулируются сопоставлением заданных по программе и фактически полученных размеров обрабатываемой детали. Основным достоинством применяемых в этих случаях приводов с электродвигателями постоянного тока является значительный диапазон плавного регулирования скоростей (до 1 : 1800).
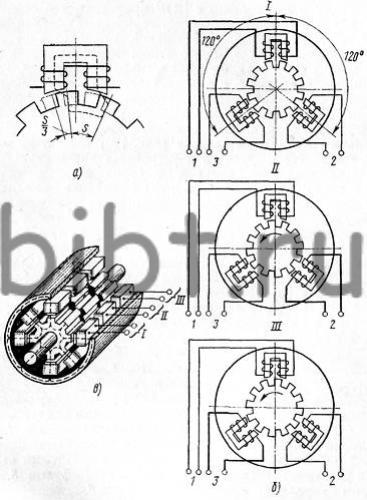
Рис. 119. Шаговый двигатель: а и б — принцип действия, в — устройство
На рис. 119 приведена схема трехстаторного шагового двигателя. Он состоит из ротора и статора и имеет вдоль оси три секции (I, II и III, рис. 119, в). Полюсы ротора разделены на три секции 1, 2, 3, но каждая из них смещена по окружности относительно рядом расположенной секции на 1/3 межполюсного расстояния. Если полюсы секции (I) ротора располагаются против полюсов статора, то полюсы секции (II) ротора смещены относительно полюсов статора на 1/3, а полюсы секции (III) на 2/3 межполюсного расстояния S (рис. 119, а и б). При подаче напряжения в секцию (I) ротор будет неподвижен, так как в этом положении он имеет минимальное магнитное сопротивление. При подаче напряжения в секцию (II) ротор повернется против часовой стрелки на 1/3 межполюсного расстояния и полюсы этой секции встанут против полюсов статора. При подаче напряжения в секцию (III) ротор снова повернется против часовой стрелки на 1/3 шага и т.д. Последовательная подача импульсов на обмотки электромагнитов статора соответствующих секций вызывает прерывистое (шаговое) вращение ротора.