
| Главная |
| Поиск по сайту |
Адрес этой страницы' ?>
<<Предыдущая страница Оглавление книги Следующая страница>>
§ 4. РЕВЕРСИВНЫЕ И ХРАПОВЫЕ МЕХАНИЗМЫ
Реверсивные механизмы — это устройства, изменяющие направление вращательного или поступательного движения. Конструкции их разнообразны, принципиально они сводятся к двум типам: механизмы с цилиндрическими зубчатыми колесами и коническими (рис. 63).
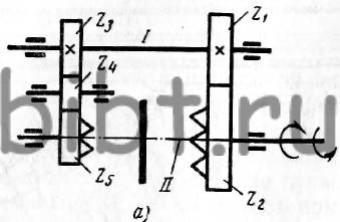
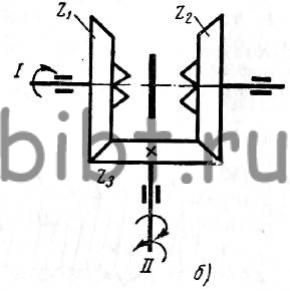
Рис. 63. Схемы реверсивных механизмов: а — с цилиндрическими, б — с коническими зубчатыми колесами
У механизма первого типа (рис. 63, а) движение передается с вала I на вал II. Жестко закрепленные зубчатые колеса z3 и z1 передают вращательное движение зубчатым колесам z5 b z2, при этом колесо z5 вращается свободно на валу II в одну сторону, а z2 — в другую. Присоединение кулачковой муфты к одному из зубчатых колес сообщит валу II направление вращения сцепленного с муфтой зубчатого колеса.
Конический реверсивный механизм (рис. 63, б) состоит из трех конических зубчатых колес и двух валов: ведущего I и ведомого II. Зубчатое колесо z1 может вращать колесо z3 в одном направлении, а z2 — в другом.
Переключая муфту к колесу z1 или колесу z2, колесу z3 сообщают различные направления вращения.
Храповые механизмы. Для осуществления прерывистого движения, каким является подача у строгальных и долбежных станков, применяют храповые механизмы, состоящие из храпового колеса и собачки (рис. 64, а).
При повороте рычага 3 против часовой стрелки находящаяся на нем собачка 2 поворачивает храповое колесо 1. При повороте рычага по часовой стрелке собачка 2 проскакивает по зубьям храпового колеса 1, не захватывая их. Чем больше угол поворота рычага 3, тем большее число зубьев проскакивает собачка, чтобы захватить их при новом движении против часовой стрелки.
При каждом двойном ходе ползуна строгального станка рычаг также делает двойной ход и поворачивает храповик на а зубьев, что составляет
n =a/ zх.р оборотов, (48)
где zх.р — число зубьев на храповом колесе;
а —число зубьев, захватываемых собачкой за один двойной ход.

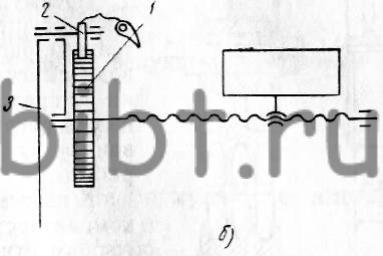
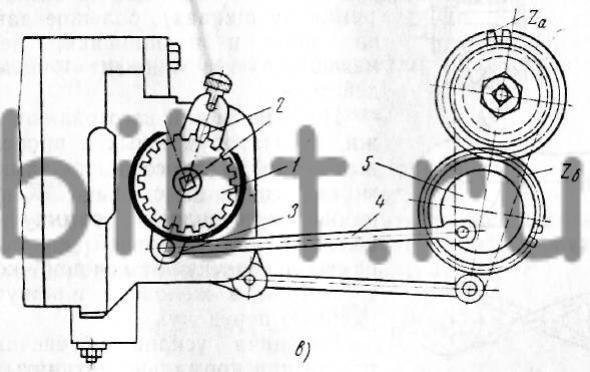
Рис. 64. Схемы храповых механизмов:
а — одностороннего, б — с винтом, в — двустороннего; 1 — храповое колесо,
2 - собачка, 3 — рычаг, 4 — тяга, 5 — кривошипный диск
Обычно храповой механизм объединяют с винтовым (рис. 64, б), получая таким образом прерывистое прямолинейное движение в одном направлении.
У храповых механизмов, рассчитанных на подачу в двух противоположных направлениях, применяют храповые механизмы с перекидной собачкой (рис. 64, в).