
| Главная |
| Поиск по сайту |
Адрес этой страницы' ?>
<<Предыдущая страница Оглавление книги Следующая страница>>
Разомкнутые системы ЧПУ.
Современные системы ЧПУ различаются по отсутствию или наличию обратных связей в механизмах перемещений рабочих органов. Системы без обратных связей называются разомкнутыми (рис. 1.8, а), а с обратными связями— замкнутыми (рис. 1.8, б). Замкнутые системы сложнее разомкнутых по конструкции, но в целом работают точнее последних, поскольку здесь фактическая отработка перемещений не только сравнивается с заданной, но и корректируется системой ЧПУ по сигналам датчика обратной связи.
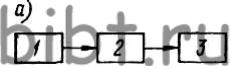
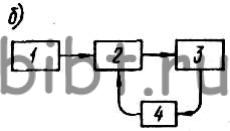
Рис. 1.8. Блок-схемы станков с разомкнутой (а) и замкнутой (б) системами управления:
1 — узел программы; 2 — узел управления; 3 — узел исполнительных механизмов; 4 — узел обратной связи.
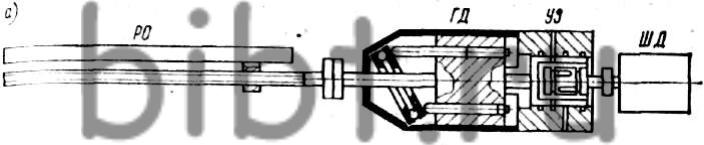
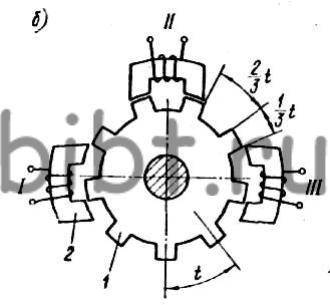
Рис. 1.9. Шагово-импульсный привод подачи с гидроусилителем момента: а — схема привода; б — схема шагового двигателя.
Разомкнутые системы ЧПУ, в механизмах подач которых использованы так называемые шаговые двигатели, называют шагово-импульсными.
Шаговый двигатель системы ШД (рис. 1.9, а, б) имеет зубчатый ротор 1 и статор с полюсами 2, на обмотки которых поочередно подаются управляющие импульсы. Каждый импульс вызывает поворот ротора на один элементарный угол. Например, если очередной импульс подан на обмотку, то положения зубцов статора и ротора совпадают.
Когда следующий импульс будет подан на обмотку III, то ротор повернется по часовой стрелке на величину 1/3 t (где t — шаг зубцов ротора). Угол поворота α ротора шагового двигателя от одного импульса будет равен:
α=360° / (k*z),
где k — число обмоток статора;
z — число зубцов ротора.
При значениях k = 3; z=9 α= 360°/(3*9) = 13°20'.
Шаговые двигатели выпускают со следующими углами поворота от одного импульса: 1° (120 зубцов на роторе при трех обмотках статора); 1,5° (80 зубцов); 3° (60 зубцов); 4,5°; 6°; 9°; 15°; 18°; 22,5°; 36°.
Крутящего момента, развиваемого шаговым двигателем, как правило, недостаточно для непосредственного использования его в качестве привода механизма подачи. Поэтому обычно шаговый двигатель применяют только в качестве задающего устройства, сигналы которого усиливаются различными способами. Наибольшее распространение в станках с ЧПУ получили гидроусилители конструкции ЭНИМСа (Экспериментального научно-исследовательского института металлорежущих станков). Эти гидроусилители (см. рис. 1.9, а) состоят из аксиально-поршневого гидродвигателя ГД со следящим управлением от золотника УЗ, который приводится во вращение шаговым двигателем ШД. Вал гидроусилителя связан с ходовым винтом привода подач рабочего органа РО. При работе системы гидроусилитель обеспечивает синхронное вращение выходного и входного валов при многократном увеличении крутящего момента.
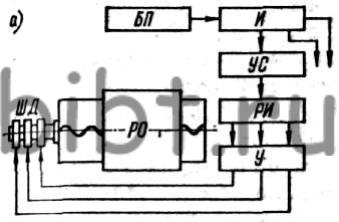
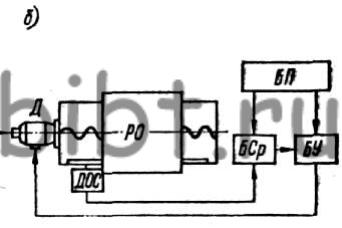
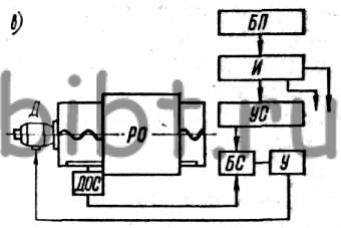
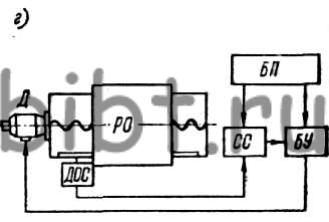
Рис. 1.10. Функциональные схемы станков с ЧПУ:
а — шагово-импульсная; б —счетно-импульсная; в —импульсная следящая; г — кодовая.
На рис. 1.10, а представлена функциональная схема шагово-импульсной СЧПУ. Управляющая программа в виде перфоленты вводится в блок программы БП, где производятся считывание и расшифровка команд. Интерполятор И преобразует эту информацию в управляющие импульсы с распределением их между всеми приводами подач (на рис. 1.10, а показан только один привод). Поступившие из интерполятора импульсы усиливаются усилителем считывания УС и направляются в распределитель импульсов РИ, который осуществляет распределение импульсов между обмотками статора шагового двигателя ШД. Перед поступлением импульсов на ШД производится их усиление силовым усилителем У. Двигатель начинает работать и обеспечивает перемещение рабочего органа РО на заданную величину.
Правильность выполнения заданных программой перемещений в разомкнутой системе не контролируется.
Поэтому возможны ошибки из-за потерь в момент разгона или из-за отработки лишних импульсов в момент торможения двигателя, особенно при малой протяженности ускоренных перемещений. Чем больше частота подачи импульсов, тем больше вероятность появления ошибки. Шаговый двигатель имеет два предельно допустимых значения частот, при которых ошибки еще не возникают:
а) допустимая величина ступенчатого изменения (перепада) частот, называемая приемистостью двигателя;
б) допустимая максимальная частота подачи импульсов при условии плавного или ступенчатого ее изменения на величину, не превышающую приемистости. Например, для шагового двигателя ШД-5Д1 первая частота составляет 2000 Гц (имп/с), что при дискретности отработки перемещений 0,01 мм/имп соответствует максимальной рабочей подаче sp = 2000*60*0,01 = =1200 мм/мин. Вторая частота равна 8000 Гц (имп/с), что соответствует ускоренной подаче при выполнении холостых перемещений sx=8000*60*0,01=4800 мм/мин.