
| Главная |
| Поиск по сайту |
Адрес этой страницы' ?>
<<Предыдущая страница Оглавление книги Следующая страница>>
Замкнутые системы ЧПУ.
В замкнутых системах ЧПУ рассогласование между действительными и заданными величинами перемещений устраняется при использовании узла обратной связи (см. рис. 1.8, б).
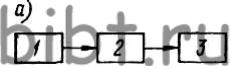
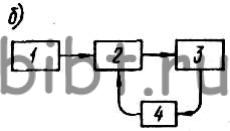
Рис. 1.8. Блок-схемы станков с разомкнутой (а) и замкнутой (б) системами управления:
1 — узел программы; 2 — узел управления; 3 — узел исполнительных механизмов; 4 — узел обратной связи.
Существует ряд разновидностей замкнутых систем. Наиболее распространенными из них являются: а) для позиционного управления — счетно-импульсная и годовая системы; б) для контурного управления — импульсная следящая система.
В счетно-импульсных системах (рис. 1.10, б) информация о заданной величине перемещения вводится в блок программы БП. Число, выражающее величину перемещения и перекодированное в соответствующее ему количество импульсов, передается в блок сравнения БСр и запоминается. Код технологических и вспомогательных команд (адреса рабочих органов, направления и скорости перемещений) передается в блок управления БУ и там расшифровывается. Если в БСр имеется некоторое число, отличающееся от нуля (т. е. задана величина перемещения), то БУ посылает управляющий сигнал включения двигателю Д того привода, который осуществляет перемещение предусмотренного программой РО. Датчик обратной связи ДОС при перемещении рабочего органа направляет в БСр импульсы обратной связи. Каждый поступивший импульс уменьшает заданное программой в БСр их количество на единицу. Когда РО отработает требуемую величину перемещения, число импульсов в БСр станет равным нулю. Двигатель привода РО отключается, система переходит к отработке следующей команды.
В импульсных следящих системах (рис. 1.10, в) в соответствии с командами из блока программы БП интерполятор И выдает импульсы, которые направляются через усилитель считывания УС в блок слежения БС, представляющий собой реверсивный счетчик импульсов. На выходе БС создается напряжение, пропорциональное числу накопленных в нем импульсов. Это напряжение повышается в силовом усилителе У и подается на двигатель Д привода подачи рабочего органа РО. Двигатель начинает работать, и РО перемещается в заданном направлении. При движении рабочего органа импульсы датчика обратной связи ДОС направляются в БС и непрерывно гасят в нем поступающие из интерполятора командные импульсы. Из-за инерции механизма подач и самого рабочего органа в блоке слежения образуется некоторый потенциал рассогласования, пропорциональный числу избыточных импульсов, еще не отработанных механизмом подач. Чем больше этот потенциал, тем выше напряжение на двигателе Д и, следовательно, больше частота его вращения и скорость движения РО.
После прекращения поступления от интерполятора командных импульсов движение рабочего органа продолжается до тех пор, пока импульсы обратной связи не погасят весь потенциал, накопленный в БС.
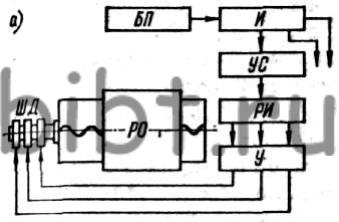
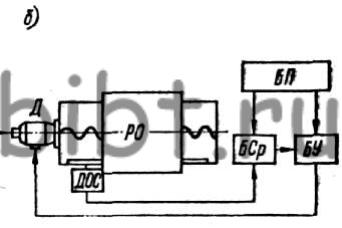
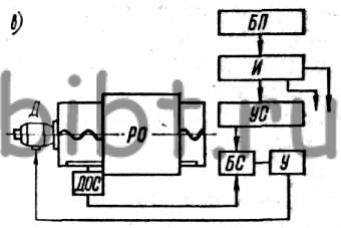
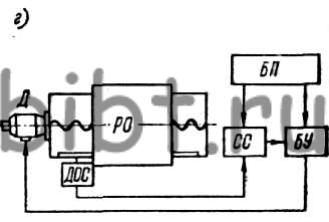
Рис. 1.10. Функциональные схемы станков с ЧПУ:
а — шагово-импульсная; б —счетно-импульсная; в —импульсная следящая; г — кодовая.
В кодовых системах (рис. 1.10, г) из блока программы БП в схему совпадения СС поступают сигналы, соответствующие значению координаты, на которую согласно программе должен выйти рабочий орган РО (число в двоичном коде). Сигналы, пройдя через блок управления БУ, вызывают включение двигателя подачи Д в требуемом направлении, и РО начинает перемещаться к заданной позиции. Датчик обратной связи ДОС формирует и передает в схему совпадения сигналы, соответствующие фактическим значениям координат при движении рабочего органа.
В качестве датчиков обратной связи, преобразующих линейные или круговые перемещения рабочих органов в импульсы, в счетно-импульсных и импульсных следящих системах применяются различные преобразователи, и в частности фотоэлектрические импульсные датчики.
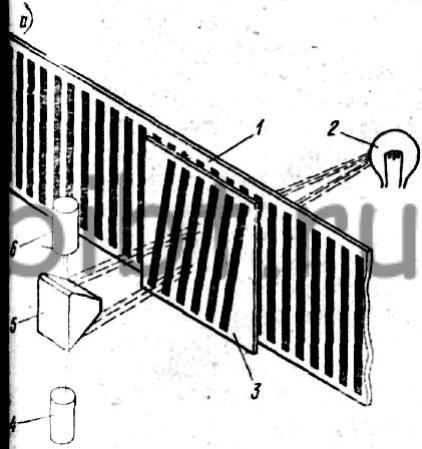
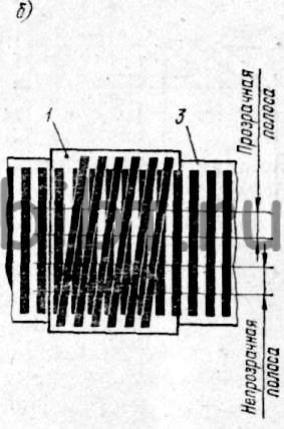
Рис. 1.11. Схема фотоэлектрического датчика обратной связи:
а — расположение элементов датчика; б — схема образования муаровых полос.
Схема линейного фотоэлектрического импульсного датчика обратной связи показана на рис. 1.11, а. Стеклянная линейка 1 датчика крепится вдоль направляющих стола (или суппорта) на станине. На линейке нанесены непрозрачные штрихи с шагом, равным величине дискретности системы (например, 0,01 мм). На столе станка установлена каретка с движком 3, фото-элементами 4 и 6 и осветителем 2. Движок 3 представляет собой короткую линейку, подобную линейке 1, но со штрихами, расположенными наклонно. При перемещении стола с движком относительно линейки 1 в просвете движка и линейки появляются широкие непрозрачные горизонтальные муаровые полосы (рис. 1.11, б), перемещающиеся в вертикальном направлении и воспринимаемые фотоэлементами. Каждая муаровая полоса соответствует импульсу, который можно «оценить» как шаг между штрихами линейки 1. Сигналы фотоэлементов 4 и 6, освещаемых через отражатель 5, различны по времени. Этот сдвиг фаз сигналов используется для определения направления перемещения стола.
Кодовые датчики обратной связи преобразуют координаты рабочих органов в сигналы, соответствующие числам в двоичном коде, с помощью кодовых шкал.
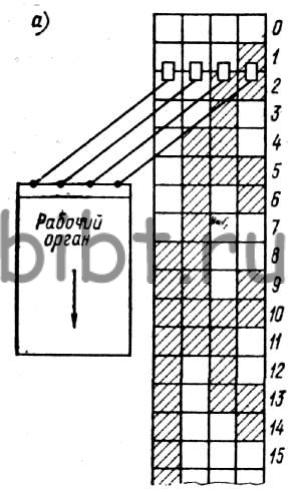
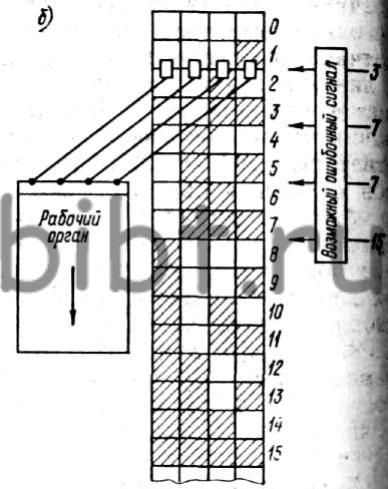
Рис. 1.12. Схемы кодовых датчиков обратной связи: а — в коде Грея; б — в двоичном коде 8-4-2-1.
На рис. 1.12 показаны схемы простейших датчиков — кодовых линеек, располагаемых на станке параллельно на правлению движения рабочего органа. Сигналы снимаются с линеек с помощью электрических щеток, разметенных на подвижном органе станка.
Кодовая шкала составлена из металлических и неметаллических участков (заштрихованные и незаштрихованные квадраты на рис. 1.12). Металлические участки обеспечивают электрический контакт со щетками датчика, а неметаллические (изолирующие) не дают такого контакта. При движении рабочего органа щетки датчика последовательно проходят участки, считывая с линейки различные их комбинации. При этом если щетка контактирует с металлическим участком, то по линии обратной связи в схему совпадения подается соответствующий сигнал. Как только комбинация сигналов с датчика обратной связи будет соответствовать комбинации сигналов, заданных в управляющей программе, схема совпадения подаст команду на прекращение подачи. Систему настраивают так, что несколько раньше фактического выхода РО в заданную позицию скорость движения РО переключается на замедленную. Окончательный вывод РО на заданную координату на замедленном ходу производится с контролем от другого, более чувствительного датчика. Благодаря этому удается снизить влияние инерционных нагрузок и достигнуть высокой точности позиционирования.
В кодовых линейках могут быть использованы различные варианты кодов. Первые кодовые линейки были построены на основе двоичной системы счисления в коде 8-4-2-1 (рис. 1.12, б). Их недостаток состоит в том, что контакты щеток могут перекрывать промежутки между участками и датчик в отдельных случаях будет формировать ошибочные сигналы. Чтобы избежать этого, для построения кодовых линеек используют другие коды, например так называемый однопеременный код Грея (рис. 1.12,а).