
| Главная |
| Поиск по сайту |
Адрес этой страницы' ?>
<<Предыдущая страница Оглавление книги Следующая страница>>
§ 3. Роботы. Робот, обслуживающий штамповочный пресс.
Автоматизацию выгодно внедрять в массовом производстве, однако в последнее время отмечается рост удельного веса мелкосерийного и серийного производства в общей структуре машиностроения. Это потребовало, поиска новых форм автоматизации тяжелых и монотонных работ, к числу которых относится и штамповка. В этой связи все большее применение находят роботы - машины с человекоподобным поведением, используемые для выполнения вспомогательных операций: укладки в штамп заготовки, удаления готовой детали и т. п. Чаще всего робот - это механическая рука, устанавливаемая рядом с обслуживаемым прессом на неподвижной опоре, на специальных направляющих, по которым возможно ее передвижение по ходу выполняемых операций, или на колесном ходу. Если рука человека имеет 27 степеней свободы, то робот - в 4-5 раз меньше. Тем не менее он справляется со своими несложными обязанностями лучше человека, заменяя до 2-4 рабочих.
Основная проблема внедрения роботов в производство - это проблема их окупаемости. Хотя совершенствование техники и технологии ведет к постепенному их удешевлению, существуют и другие пути сделать роботы широкодоступными различным отраслям промышленности. Во-первых, это модульный принцип построения робота, когда отдельные части роботов самого различного назначения выполняются из унифицированных элементов. Во-вторых, это тенденция изготовлять универсальных, а не узко специализированных роботов, которые при быстрой замене рабочего органа могут не только перестроиться со штамповки одной детали на штамповку другой, но и выполнять сварочные, малярные, погрузочно-разгрузочные работы.
Привод механизмов робота - пневматический или гидравлический в зависимости от используемой мощности. Сигналы на включение тех или иных механизмов поступают согласно программе, записанной на магнитной или перфоленте через микропроцессоры которыми оснащен каждый рабочий орган. «Мозгом» современного робота является ЭВМ. Роботы, создаваемые в настоящее время, оснащаются специальными датчиками; такой робот, обнаружив нарушения в ходе технологического процесса, способен принять и осуществить решение для их устранения. Например, он может нужным образом сориентировать заготовку, прежде чем уложить ее в штамп, сигнализировать об отсутствии заготовок и других нарушениях.
На рис. 74 показан один из роботов, обслуживающих штамповочный пресс. Рука 2 смонтирована на колонне 6, вокруг которой она может вращаться благодаря зубчатой передаче от электродвигателя через понижающий редуктор. Рука может также покачиваться в вертикальной плоскости под действием гидроцилиндра 5, привод которого размещен внутри блока управления 1, на задней стороне которого расположен пульт управления 7. Там же находится и пневмопривод выдвигающейся части 3 руки и захвата 4, который может вращаться вокруг своей оси, а также зажимать и отпускать заготовку. Пальцевый захват можно заменить пневмоприсосками на две или больше детали.
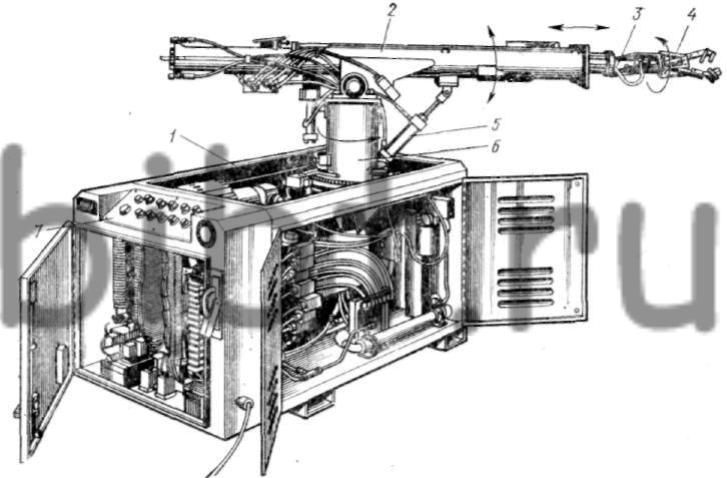
Рис. 74. Робот, обслуживающий штамповочный пресс:
1- блок управления, 2 - рука, 3 - выдвигающаяся часть руки, 4 - захват, 5 - гидроцилиндр, 6 - колонна, 7 - пульт управления