
| Главная |
| Поиск по сайту |
Адрес этой страницы' ?>
<<Предыдущая страница Оглавление книги Следующая страница>>
§ 3. ПОПЕРЕЧНО-СТРОГАЛЬНЫЙ СТАНОК 7Е35. Техническая характеристика. Кинематическая схема.
Станок предназначен для обработки методом строгания плоских и фасонных поверхностей, для прорезания прямоугольных пазов, канавок в условиях единичного и мелкосерийного производства.
Техническая характеристика станка 7Е35. Наибольший ход ползуна 520 мм; размеры рабочей поверхности стола (длина X ширина) 500 x 360 мм; наибольшее расстояние от опорной поверхности резца до станины (вылет) 670 мм; наибольшее горизонтальное перемещение стола 530 мм; пределы частоты ходов ползуна 13,2- 150 дв. ход/мин; число скоростей ползуна 8; пределы горизонтальных подач стола 0,2-40 мм/дв, ход; число горизонтальных подач стола 20; пределы механических подач суппорта 0,16-1,0 мм/дв. ход; число подач суппорта 6; габаритные размеры станка 2350 X X 1250 X 1550 мм.
Основные механизмы и движения в станке (рис. 116). Главное движение - прямолинейное возвратно-поступательное перемещение ползуна 3 с суппортом 2 по направляющим станины 7. Движения подач - прерывистое прямолинейное перемещение стола 1 с заготовкой по направляющим поперечины 6 в горизонтальном направлении, поперечины со столом по направляющим станины в вертикальном направлении, а также поступательное перемещение суппорта 2 с резцом в вертикальном направлении. В станине расположены коробка скоростей 4 и коробка подач 5.
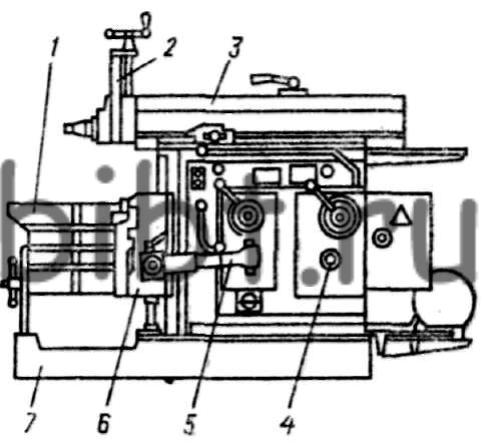
Рис. 116. Поперечно-строгальный станок 7Е35
Кинематика станка 7Е35 (рис. 117). Главное движение ползун получает от электродвигателя M1 (N = 5,5 кВт, n=1450 мин-1) через клиноременную передачу с диаметрами шкивов D = 140 и D = 355 мм, блоки зубчатых колес Б1, Б2, Б3, зубчатую пару z = 18-102. В направляющих кулисы 1 находится палец 3 с камнем 2. При вращении кулисного колеса z = 102 кулиса получает качательное движение, которое через винт XXIII с шагом Р = 6 мм передается ползуну. Длину хода ползуна можно отрегулировать вручную от вала XV через передачи z = 16-18, z = 17-17. При этом с помощью винта IX меняется радиус положения пальца 3. Длина хода ползуна отмечается на лимбе.
Увеличить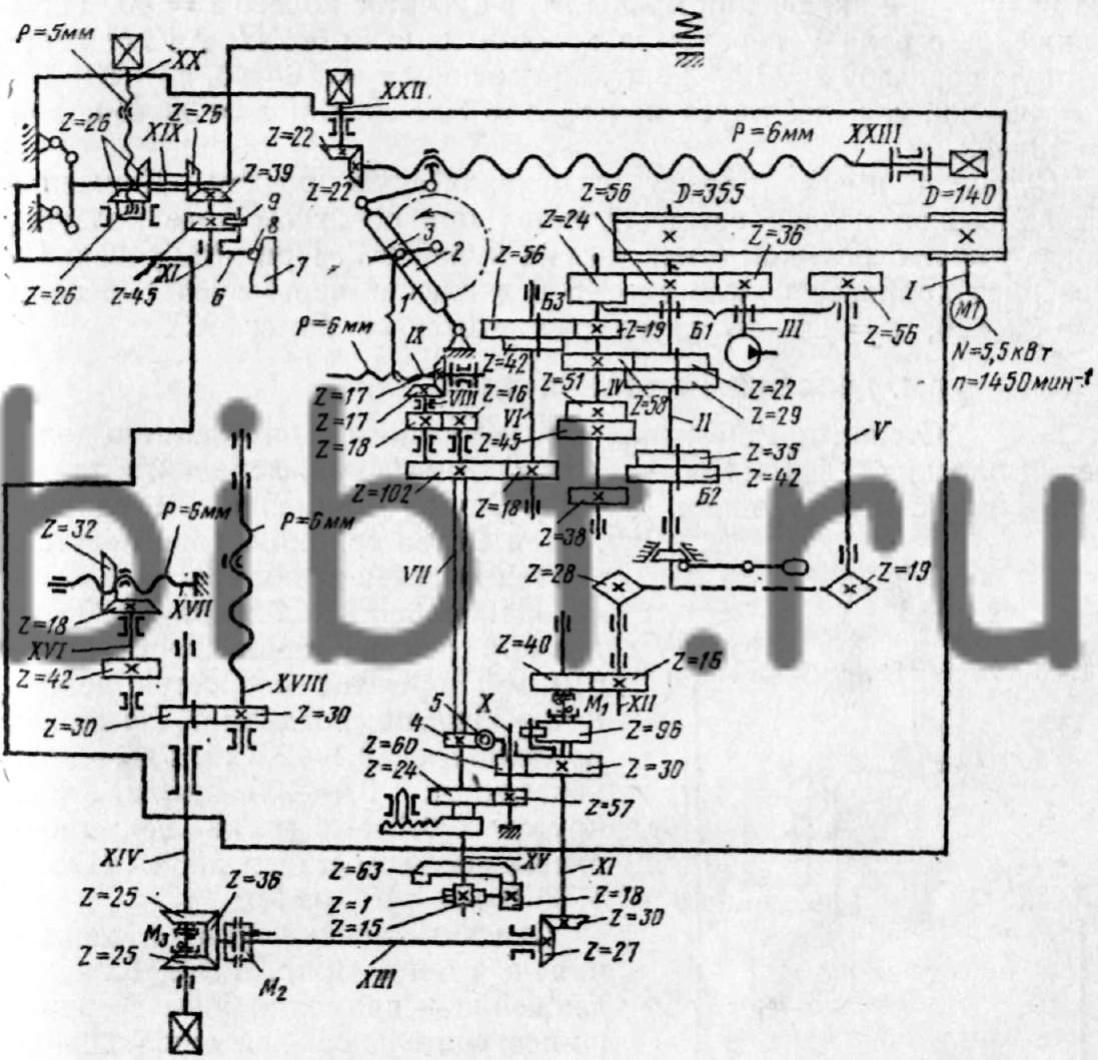
Рис. 117. Кинематическая схема поперечно-строгального станка 7Е35
Движения подачи 7Е35. Подача стола происходит только при вспомогательном (обратном) движении ползуна. От колеса z=102 движение передается кулачку 4. Вращаясь, кулачок 4 через ролик 5, зубчатый сектор z=60 и колесо z=30 приводит в действие храповой механизм. Затем движение передается валам XI, XIII, XIV и далее через передачу z=30-30 на винт вертикальной подачи XVIII или через зубчатые пары z=30-42, z=18-32 на винт горизонтальной подачи XVII. Величина подачи зависит от числа зубьев храповика, захватываемых собачкой. Изменение величины подачи производят удалением или приближением плеча с роликом 5 рычага-сектора к диску кулачка 4, в результате чего меняется угол поворота рычага.
Величина горизонтальной подачи стола определится из уравнения

где а - число захватываемых зубьев храповика.
Муфта М3 служит для изменения направления подачи, муфта М2 - предохранительная. Колесо z = 30 на валу XIV осуществляет блокировку подач: в положении, указанном на схеме, включена вертикальная подача, а при зацеплении z = 30 с колесом z = 42 на валу XVI будет происходить горизонтальная подача.
Быстрые перемещения стола станка 7Е35 осуществляются от звездочки z = 12 на валу V при включении муфты М1 в зубчатое колесо z = 40. Тогда движение с вала V передается ходовым винтам XVII, XVIII через цепную передачу z =19- 28, зубчатые пары z = 16-40, z = 30-27, z = 36-25, а далее через колеса z = 30-30 или z = 30-40, z = = 18-32.
Суппорт поперечно-строгального станка 7Е35 имеет ручную и механическую подачу. Движение механической подачи осуществляется при обратном ходе ползуна, когда рычаг 6 роликом 8 находит на кулачок 7. При этом собачка 9 повернет храповое колесо z = 45 и движение через зубчатые пары z = 39-26, z = 26-26 передается ходовому винту XX.