
| Главная |
| Поиск по сайту |
Адрес этой страницы' ?>
<<Предыдущая страница Оглавление книги Следующая страница>>
Кинематическая схема токарнокарусельного станка 1512Ф3 с ЧПУ.
Кинематика станка 1512Ф3. Главное движение (рис. 55) осуществляется от электродвигателя M1 (N = 30 кВт, n=1460 мин-1) через клиноременную передачу со шкивами D = 230 мм и D = 266 мм и коробку скоростей, обеспечивающую 18 практических и 24 теоретических значения частот вращения планшайбы в результате переключения электромагнитных муфт М1 -М7 и с помощью планетарного механизма. Вал II имеет три значения частоты вращения, получаемые переключением муфт М1, М2, М3; вал III - шесть значений частот вращения (переключают муфты М4 и М5) и вал IV - 12 значений частот вращения (переключают муфты М6 и М7). Для получения 12 низших значений частот вращения шпинделя выключают муфту М8 и включают муфты М9 и М10. При этом колесо z = 63 на оси VII затормаживается и через колесо z = 63 на валу VI останавливает колесо z = 87 планетарного механизма и соответственно его корпус с колесом z = 108. В этом случае передаточное отношение планетарного механизма равно 1/4.
При выключенных муфтах М9 и М10 и включенной М8 планетарный механизм представляет собой одно целое и его передаточное отношение равно единице. При одновременном включении муфт М8, М9 и М10, замыкающих две различные кинематические цепи, образующие «замок», происходит торможение планшайбы (остальные муфты коробки скоростей выключены). Благодаря электромагнитным муфтам скорости переключаются на ходу и тем самым поддерживается ступенчато-постоянная скорость резания при обработке торцовых поверхностей.
Увеличить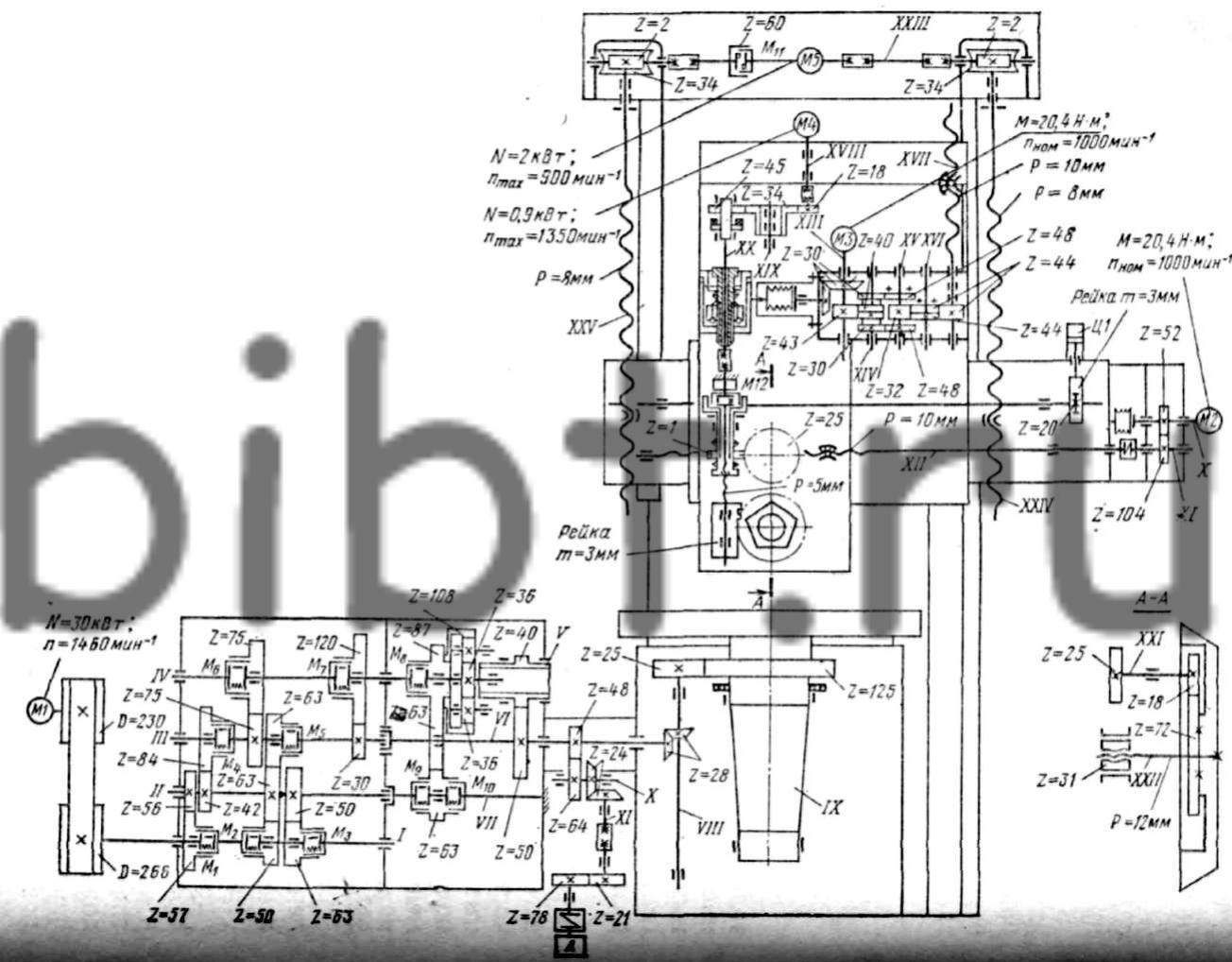
Рис. 55. Кинематическая схема токарнокарусельного станка 1512Ф3 с ЧПУ
Уравнение кинематической цепи для минимальной частоты вращения шпинделя будет следующим:

Датчик нарезания резьбы, необходимый для нарезания резьб резцами, получает вращение от выходного вала коробки скоростей через передачи z=48-64, z = 24-24, z = 21-78. Частоты вращения ротора датчика и планшайбы одинаковы.
Движения подачи станка 1512Ф3 происходят от электродвигателей постоянного тока М2 и М3 (М = 20,4 Н*м; nном= 1000 мин-1) с тиристорным управлением. Ходовой винт качения продольной подачи XII с шагом Рх.в=10 мм получает движение от электродвигателя М2 через зубчатую передачу z = 52-104, выполненную с минимальным боковым зазором. Передача вращения с вала XI на винт XII осуществляется посредством конусных пружинных колец, исключающих зазор в соединении.
Максимальная рабочая
продольная подача определится из выражения 
где 60 - максимальная частота вращения двигателя при рабочих подачах.
Ходовой винт качения XVII вертикальной подачи получает вращение от электродвигателя М3 через редуктор z= 43-40, z =30-48, z= 32-44, z=44-44. Для регулирования бокового зазора в зубчатых передачах имеются две параллельные кинематические цепи, кроме того, отдельные колеса выполнены разрезными
Минимальная рабочая вертикальная подача

где 0,6 - минимальная частота вращения двигателя.
В качестве датчиков обратной связи применены линейные индуктосины.
Вертикальное перемещение поперечины станка 1512Ф3 осуществляется от реверсивного электродвигателя М5 (N = 2 кВт, n= 900 мин-1) через червячные редукторы z=2-34. В требуемом положении поперечина надежно фиксируется гидравлическим механизмом зажима. Привод механизма зажима-разжима осуществляется штоком двустороннего цилиндра Ц1. Зубчатая муфта М11 служит для установки поперечины параллельно рабочей поверхности планшайбы Поворот полумуфты на один зуб дает величину перемещения поперечины на 0,005 мм.