
| Главная |
| Поиск по сайту |
Адрес этой страницы' ?>
<<Предыдущая страница Оглавление книги Следующая страница>>
Посадочные машины напольного типа (шаржир-машины). Подъемно-транспортные машины, манипуляторы.
Полностью устраняют тяжелый ручной труд посадочные машины напольного типа (шаржир-машины), предназначенные для подачи заготовок со склада к нагревательным печам, загрузки и выгрузки их из печей, подачи нагретых заготовок от печи к молоту. В кузнечных цехах применяются посадочные машины следующих типов: напольные рельсовые, напольные безрельсовые, стационарные и подвесные.
На рис. 52 показана напольная безрельсовая посадочная машина. На тележке 1 с передними ведущими колесами 7 и задними 2 установлена рама 4 с направляющими, по которым при помощи гидравлического цилиндра 12 перемещается в вертикальном направлении каретка 8 с хоботом 5. Хобот снабжен рычажной системой 6 клещевого зажима заготовки 10, работающей от электродвигателя 9 с редуктором 11. Источником энергии служат аккумуляторные батареи 3, питающие электродвигатель. Противовесы 13 сообщают машине устойчивость.
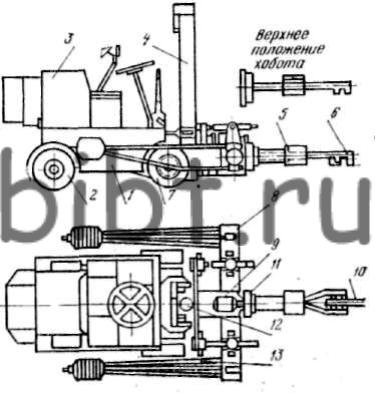
Рис. 52. Безрельсовая посадочная машина
Для выполнения транспортных и технологических операций при производстве поковок применяются подъемно-транспортные машины, называемые манипуляторами. Они обеспечивают захват и удержание заготовки, перемещение ее в вертикальной и горизонтальной плоскостях, вращение заготовки вокруг своей оси. Эти машины обладают большой универсальностью, маневренностью и позволяют повысить производительность ковочных агрегатов в 1,5—2 раза.
Манипуляторы бывают рельсовые, безрельсовые и подвесные. В свою очередь рельсовые манипуляторы разделяются на мостовые ширококолейные без поворота и с поворотом хобота вокруг вертикальной оси; тележечные узкоколейные без поворота и с поворотом хобота вокруг вертикальной оси; с мостом, вращающимся по круговому рельсу, уложенному на полу цеха.
На рис. 53 приведена схема тележечного узкоколейного манипулятора с поворотной тележкой. Он снабжен механизмами: подвески хобота 1, поворота хобота 2, подъема хобота 3 и поворота тележки 4. Хобот может поворачиваться на 360° вокруг вертикальной оси.
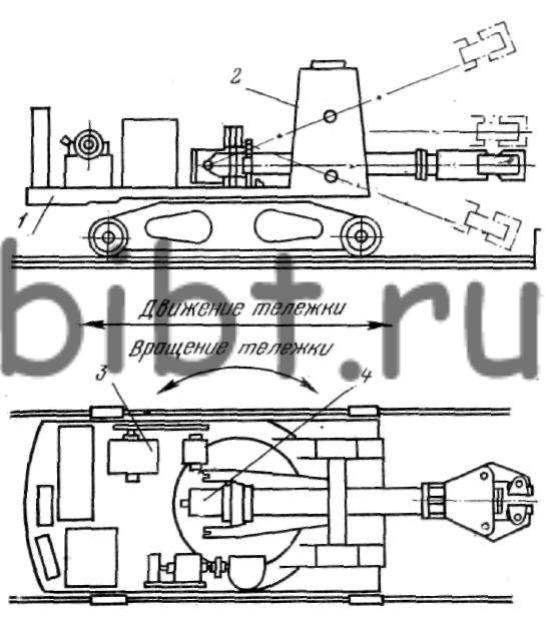
Рис. 53. Схема тележечного узкоколейного манипулятора
Манипулятор этого типа используется в серийном и крупносерийном производстве поковок. Его грузоподъемность до 20 т.
Механизм зажима должен обеспечивать удержание заготовки при любом угловом положении плоскости клещевых рычагов, механизм перемещения — реверсивное перемещение манипулятора с требуемыми скоростями, механизм подъема — подъем, надежное удержание поковки в любом положении и горизонтальное положение хобота на любой высоте ковки.