
| Главная |
| Поиск по сайту |
Адрес этой страницы' ?>
<<Предыдущая страница Оглавление книги Следующая страница>>
Схема управления строгальным станком с программным управлением (начало).
Схема управления строгальным станком с программным управлением представлена на рис. 128.
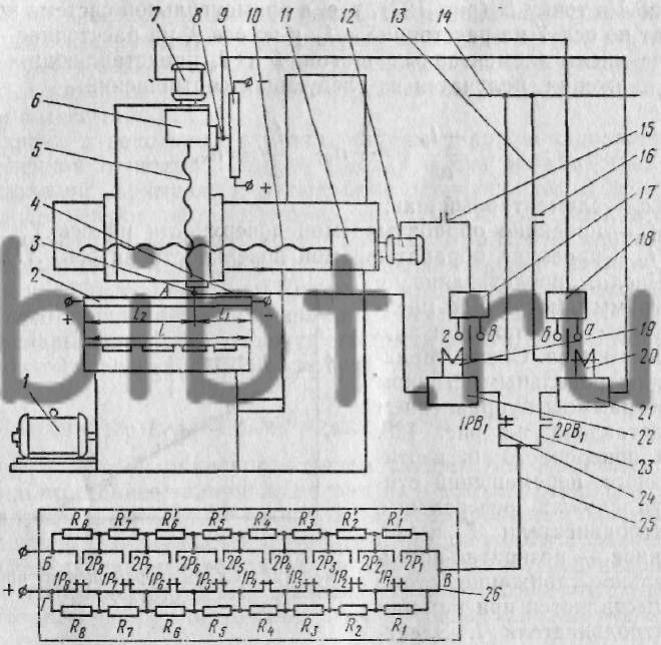
Рис. 128. Схема управления продольно-строгальным станком c ЧПУ
Для поперечного и вертикального перемещений суппорта служат реверсивные электродвигатели 7 и 12.
Главное — возвратно-поступательное движение стола осуществляется при помощи электродвигателя 1. Электродвигатель 12 через редуктор 11 связан с винтом 10 поперечной подачи, а электродвигатель 7 через редуктор 6 — с винтом 5 вертикальной подачи. Электродвигателем поперечной подачи управляет аппаратура, размещенная в блоке 17, а электродвигателем вертикальной подачи—аппаратура в блоке 18.
Если к сети питания 14 подключен контакт а блока 18, то вал электродвигателя 7 вращается в одном направлении, если подключен контакт б— то в противоположном. Тем самым изменяется направление перемещения вертикального суппорта станка. Включением и выключением контактов а и б и соответственно включением и выключением электродвигателя 7 управляет поляризованное реле 20, которое включает усилитель 21. Якорь реле, связанный проводником 13 с сетью питания 14, подключает к сети контакт а или б, либо занимает среднее положение, при котором оба контакта выключены. К усилителю 21 подведено напряжение от скользящего контакта 8 и от магазина сопротивлений 26 командоаппарата через проводники 25 и 23.
Если напряжения, подведенные от скользящего контакта 8 и от магазина сопротивлений 26, равны друг другу, реле 20 выключено, якорь занимает среднее положение и электродвигатель 7 не работает. Если напряжение, снимаемое с сопротивления 9 через скользящий контакт 8, меньше напряжения, подводимого от магазина, то подключается контакт а и суппорт перемещается вверх. Если наоборот, то замыкается контакт б и суппорт перемещается вниз. При перемещении суппорта контакт 8 перемещается по сопротивлению 9, подключенному обоими концами к сети питания, т. е. по схеме потенциометра.
Особенностью этой схемы является то, что напряжение на скользящем контакте 8 изменяется прямо пропорционально величине его перемещения. Например, при перемещении контакта на каждые 10 мм напряжение изменяется на 10 в. Эта особенность данной схемы позволяет задавать величину перемещения суппорта, устанавливая соответствующее напряжение в цепи, связывающей магазин сопротивлений с усилителем.
Предположим, что суппорт остановился в каком-то положении, когда напряжения в цепи, связывающей контакт 8 с усилителем 21, и в цепи, связывающей магазин с усилителем, равны. Если суппорт надо передвинуть на 5 мм, необходимо увеличить напряжение в цепи магазин —усилитель на 5 в. При перемещении суппорта, а следовательно, и скользящего контакта на 5 мм, напряжение в цепи контакт — усилитель изменится на 5 в и станет равным напряжению в цепи магазин —усилитель, и реле 20 выключит электродвигатель 7.
Аналогичную схему управления имеет электродвигатель 12 поперечного перемещения суппорта. Аппаратура управления перемещением поперечного суппорта размещена в блоке 17. При подключении к сети питания контакта в электродвигатель 12 работает в одном направлении, а при подключении контакта г — в противоположном. Переключение контактов в и г осуществляется якорем поляризованного реле 19, включает и выключает которое усилитель 22.
Двигатели вертикального и поперечного перемещений суппортов включаются только в конце холостого хода стола. Это достигается тем, что контакты 15 и 16 в цепи питания этих двигателей замыкаются только в конце рабочего хода. К усилителю 22 с одной стороны подводится через проводник 4 напряжение, снимаемое с сопротивления 2 контактом 3, с другой стороны — от магазина сопротивлений. Скользящий контакт перемещается вместе с суппортом и скользит по сопротивлению 2, включенному по схеме потенциометра. Усилители 21 и 22 подключаются к магазину сопротивлений при помощи контактов 1РВ1 и 2РВ1 реле управления. При перемещении поперечного суппорта подключается усилитель 22, при перемещении вертикального суппорта—усилитель 21. Величиной напряжения в цепи магазин сопротивлений — усилитель и включением усилителей 21 и 22 управляет перфорированная лента через командоаппарат.
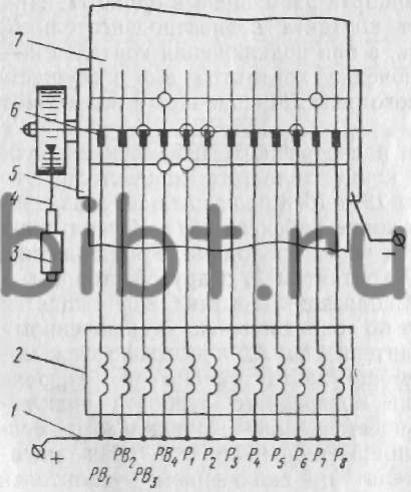
Рис. 129. Командоаппарат программного устройства