
| Главная |
| Поиск по сайту |
Адрес этой страницы' ?>
<<Предыдущая страница Оглавление книги Следующая страница>>
Промышленный робот А9720 предназначен для захвата и выноса готовой отливки из рабочей зоны машин 711А10, 71111 и 71112 литья под давлением.
Промышленный робот А9720 (рис. 18) предназначен для захвата и выноса готовой отливки из рабочей зоны машин 711А10, 71111 и 71112 литья под давлением с усилием запирания пресс-форм соответственно 6300, 8000 и 10000 кН.
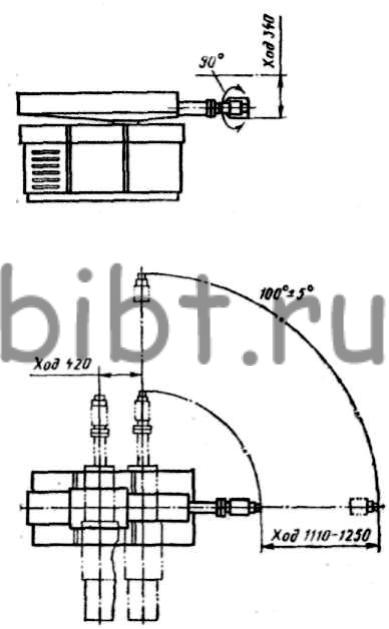
Рис. 18. Промышленный робот А9720
Техническая характеристика промышленного робота А9720
Грузоподъемность, кг 20
Число степеней свободы 5
Радиус обслуживания, мм 2415
Ход, мм:
захвата 1250
каретки 420
Вертикальное перемещение башни, мм 340
Ротация захвата, ...° 90
Поворот башни, ...° 100±5
Скорость поступательного перемещения захватного устройства в радиальном направлении, м/с 0,5
Угловая скорость поворота башни, ...°/с 40
Наименьшая высота захвата от пола, мм 1205
Габаритные размеры в плане без пульта управления, мм 2545X840
Высота, мм:
со светильником 1780
без светильника 1425
Масса без отдельно стоящего электрооборудования, кг 1750
Последовательность перемещений относительно осей координат и движения зажима задается набором программы на пульте управления в зависимости от конфигурации пресс-формы, способа подхода захвата к отливке и желаемых манипуляций с отливкой за пределами машины. Величины ходов регулируют жесткими упорами и электрическими конечными выключателями.
Наиболее сложной из осуществляемых программ работы является следующая:
ввод клещевого захвата в разъем пресс-формы;
захват отливки за пресс-остаток;
ход одновременно и синхронно с выталкиванием отливки вдоль оси машины;
вывод захвата с отливкой за пределы машины;
ротация захвата на 90° вокруг горизонтальной оси;
поворот башни робота для ввода отливки в установку охлаждения;
ввод отливки в установку охлаждения;
ввод в разъем штампа для обрезки литников и облоя;
укладывание отливки в штампе (ход вниз), разжим захвата (освобождение отливки);
возврат захвата в исходное положение для осуществления следующего цикла.
Исключая отдельные движения или группу движений, получают более простые программы. При отсутствии пресса может выполняться сброс отливок в тару или на ленточный конвейер, а также навешивание их на конвейер.
Техническая характеристика гидрооборудования промышленного робота А9720
Тип насоса Г12-22А (18П2-33)
Подача насоса, л/мин 12
Номинальное давление, МПа (кгс/см2) 6,3 (63)
Число насосов 1
Электродвигатель привода АОЛ41-6
Вместимость аккумулятора, л 16
Давление в гидросистеме, МПа (кгс/см2) 5 (50)
Рабочая жидкость Турбинное масло Т22 (ГОСТ 32-74)
Тип фильтра грубой очистки Магнитный ФМ-4
Число фильтров 1
Расход воды на охлаждение рабочей жидкости, л/мин 10
Техническая характеристика специального манипулятора для уборки отливок (обозначение А71114.00.030)
Грузоподъемность, кг 42
Усилие, кН:
цилиндра осевой каретки 7
цилиндра захвата 4,5
перемещения поперечной каретки 7
Поворот головки захватного устройства, ...° 90
Время двойного хода, с:
поперечной каретки 14
наименьшее регулируемое осевой каретки 4
захвата отливки 1
Техническая характеристика манипулятора-съемника отливок для комплекса А71117
Грузоподъемность, кг 50
Крутящий момент привода руки, Н*м 1130
Угол поворота руки, ...° 180
Усилие, Н:
цилиндра-сбрасывателя 800
цилиндра подъемного стола 7000
Ход, мм:
сбрасывателя 370
подъемного стола 720
Время двойного хода руки, с 13
Габаритные размеры, мм 4200X2320X2320
Масса, кг 1490
Техническая характеристика манипулятора-съемника отливок комплекса А71118
Грузоподъемность, кг 50
Усилие, кН:
перемещения поперечной каретки 6,3
цилиндра осевой каретки 2,0
захвата 4,0
Ход, мм:
поперечной каретки 2600
осевой каретки 330
Время, с:
двойного хода поперечной каретки 13
наименьшее двойного хода осевой каретки 5
Габаритные размеры, мм 4025X725X2240
Масса, кг 2600