
| Главная |
| Поиск по сайту |
Адрес этой страницы' ?>
<<Предыдущая страница Оглавление книги Следующая страница>>
Промышленный робот ЛМ10Ц61.01 для автоматического выполнения операций на машинах литья под давлением.
Промышленный робот ЛМ10Ц61.01 (рис. 19, табл. 23) предназначен для автоматического выполнения следующих операций на машинах литья под давлением с усилием запирания пресс-формы 4000 кН при наибольшем размере отливки в проекции на плоскость разъема в направлении извлечения до 500 мм: съем и удаление отливки, перенос отливки к специальному устройству для контроля на полноту извлечения, охлаждение отливки окунанием ее в охлаждающую жидкость, установка отливки в штамп обрубного пресса. Робот применяют в цехах и на участках литья под давлением серийного и крупносерийного производства.
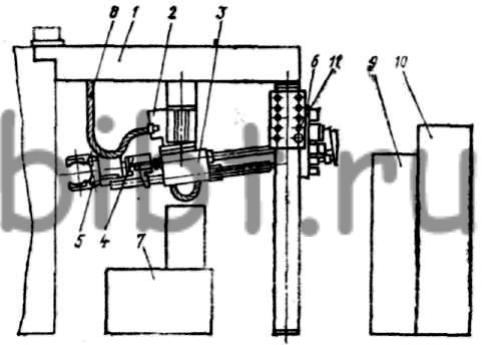
Рис. 19. Промышленный робот ЛМ10Ц61.01
23. Составные части робота ЛМ10Ц61.01
| Позиция на рис. 19 | Составная часть | Обозначение |
| 1 | Портал |
ЛМ10Ц61.01.01.000 |
| 2 | Механизм поворота |
ЛМ10Ц61.01.02.000 |
| 3 | Рука |
ЛМ10Ц61.01.03.000 |
| 4 | Захватное устройство |
ЛМ10Ц61.01.04.000 |
| 5 | Механизм схвата |
ЛМ10Ц61.01.05.000 |
| 6 | Гидропанель |
ЛМ10Ц61.01.07.000 |
| 7 | Станция гидропривода |
СВПА-40-3Н-3-5/12 |
| 8 | Электрооборудование |
ЛМ10Ц61.01.80.000 |
| 9 | Электрошкаф |
ЛМ10Ц61.01.80.100 |
| 10 | Электрошкаф |
ЛМ10Ц61.01.80.500 |
| 11 | Электропульт наладочный |
ЛМ10Ц61.01.80.600 |
Техническая характеристика робота ЛМ10Ц61.01
Грузоподъемность, кг 10
Число степеней свободы (без захвата) 5
Перемещение поступательное руки наибольшее, мм 630
Наибольшая скорость поступательного перемещения руки, м/с 0,8
Поворотное перемещение относительно неподвижной оси наибольшее, ...° 110
Скорость поворотного перемещения относительно неподвижной оси наибольшая, ...°/с 60
Наибольшее поворотное перемещение относительно оси, изменяющей свое положение в пространстве, ...° 110
Наибольшая скорость поворотного перемещения относительно
оси, изменяющей свое положение в пространстве, ...°/с 60
Наибольшее поворотное перемещение кисти, компенсирующее
угловое смещение руки при выталкивании, ...° 10
Наибольшая скорость перемещения кисти, ...°/с 30
Номинальное давление в гидросети, МПа (кгс/см2) 6,3 (63)
Габаритные размеры робота без насосной станции и электрошкафов, мм 1730X1155X1775
Масса, кг 750
Промышленный робот размещают с задней стороны машины литья под давлением. В качестве опорной базы используют неподвижную плиту машины и опирающийся на нее портал. Особенность компоновки робота - необходимость расположения оборудования (устройства для контроля полноты извлечения отливки, резервуара охлаждения отливок, обрубного пресса), обслуживаемого роботом в линию, параллельную оси машины. Компоновочная схема средств механизации с роботом приведена на рис. 20.
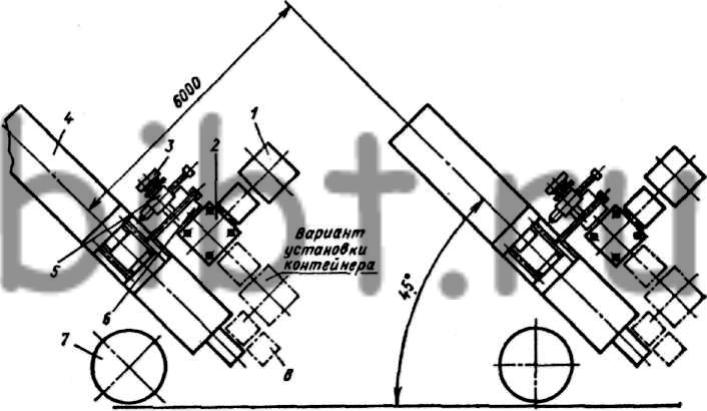
Рис. 20. Компоновочная схема размещения средств механизации с промышленным роботом ЛМ10Ц61.01:
1 - контейнер для отливок; 2 - обрубной пресс; 3 - контролирующее устройство; 4 - машина литья под давлением; 5 - промышленный робот; 6 - резервуар для охлаждения отливок; 7 - раздаточная печь; 8 - газовые баллоны аккумулятора
24. Подшипники качения (класс точности 0), использованные в роботе ЛМ10Ц61.01
| Подшипник | ГОСТ | Место установки | Число |
| 7211 | ГОСТ 333-79 | Механизм поворота | 4 |
| 7202 | ГОСТ 333-79 | Схват | 4 |
| 202 | ГОСТ 8338-75 | » | 2 |
Корпус и ось зубчатого колеса механизма поворота робота, а также оси рычагов и клиновой механизм схвата установлены на подшипниках качения (табл. 24).
В качестве приводного гидроагрегата гидросистемы применена централизованно выпускаемая станция гидропривода СВПА-40-3Н-3-5/12. Рабочая жидкость - турбинное масло Т22 (ГОСТ 32-74). Подача сдвоенного пластинчатого насоса 5/12 л/мин, установленная мощность электродвигателя 3 кВт. Станция привода оснащена необходимой контрольно-регулирующей аппаратурой и маслоохладителем; монтируется отдельно от робота. В гидросистеме робота использована контрольно-регулирующая и распределительная аппаратура, входящая в комплекс «Миниатюрная гидроаппаратура», выпускаемый отечественной промышленностью серийно. На сливной магистрали гидросистемы установлен компенсатор утечек, обеспечивающий необходимое для равномерного движения механизмов противодавление, а также восполняющий внешние утечки при длительном отключении привода. Компенсатор выполнен в виде пружинного аккумулятора с управляемым обратным клапаном.
Электрооборудование выполнено в контактном варианте с применением реле общепромышленного исполнения. Управление обеспечивает автоматический, полуавтоматический и наладочный режимы работы.