
| Главная |
| Поиск по сайту |
Адрес этой страницы' ?>
<<Предыдущая страница Оглавление книги Следующая страница>>
ПРОГРАММНОЕ УПРАВЛЕНИЕ ОТДЕЛЬНЫМ ОБОРУДОВАНИЕМ. Программное управление мостовым пескометом Н2033.
Программное управление мостовым пескометом Н2033. Особенность конструкции мостового пескомета состоит в том, что путь перемещения пескометной головки определяется двумя взаимно перпендикулярными движениями: тележки с пескометной головкой по мосту и моста по рельсам вдоль фронта набиваемых опок. В наладочном режиме оператор включает специальными рукоятками одновременно оба движения и, варьируя их скоростью, получает любой из требуемых путей обхода контура модели и опоки.
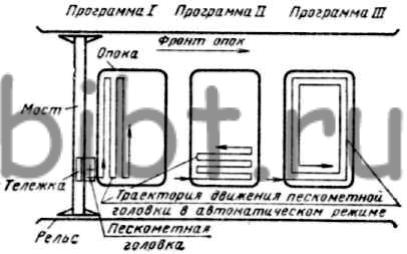
Рис. 2. Схема работы пескомета Н2033 с программным управлением в автоматическом режиме
При набивке крупных опок или изложниц движения пескометной головки упрощаются и могут быть сведены к трем перемещениям (рис. 2): зигзагообразному вдоль опоки, зигзагообразному поперек опоки и по контуру опоки. Оператор вынужден проводить постоянные переключения: либо «мост вперед» на некоторую величину, затем перемещение тележки с головкой на всю величину опоки; либо «тележка вперед» на некоторую величину, затем проход мостом на величину опоки; либо «мост вперед» на величину опоки, затем «тележка вперед» на величину опоки и, таким образом, обходит опоку по контуру. Программное управление позволяет автоматически выполнять любое из трех указанных перемещений, освобождая оператора от монотонного и утомительного труда.
Управление обеспечивает три программы:
I - мост перемещается «шажками», тележка - челноком;
II - тележка перемещается «шажками», мост- челноком;
III - движение по контуру опоки.
Наличие на плацу различных по размерам в свету опок делает невозможным использование конечных выключателей для фиксирования длины пути моста и тележки, так как выключатели блокируют их лишь в крайних положениях.
В основу программного управления положен принцип однозначности соответствия угла поворота вала приводного двигателя тележки или моста их линейному перемещению. Угол поворота вала двигателя, а соответственно и величина его перемещения определяются числом импульсов, идущих от бесконтактного датчика. В паз датчика входят лепестки диска, закрепленного на валу двигателя. Функциональная схема программного управления приведена на рис. 3.
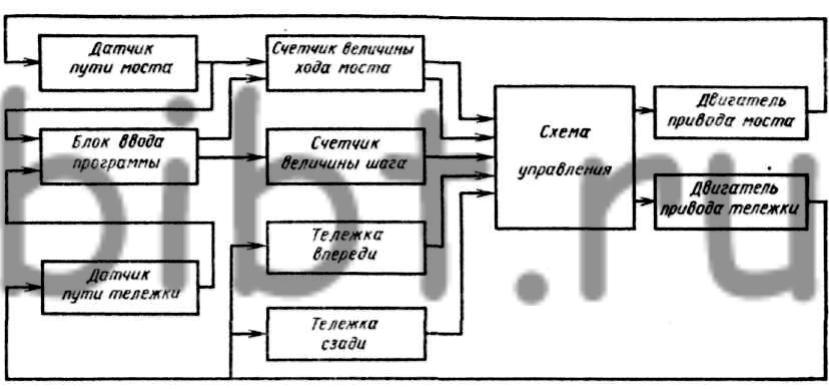
Рис. 3. Функциональная схема программного управления пескометом Н2033
Блок ввода программы определяет работу по одной из трех программ. Задается также размер шага моста или тележки. Датчик пути моста выдает число импульсов, пропорциональное пройденному мостом пути. Датчик пути тележки выдает число импульсов, пропорциональное расстоянию, пройденному тележкой. Счетчик величины хода моста предназначен для счета импульсов пути моста, поступающих с датчика, и формирования сигналов положения моста: «Мост впереди» и «Мост сзади», имитируя датчики конечных положений. При наличии опок одного размера и возможности установки датчиков конечных положений блок счетчика величины хода моста может быть исключен из схемы. Счетчик величины шага в зависимости от введенной программы считает импульсы моста или тележки при движении их «шажками». При движении их по контуру вход счетчика величины шага блокируется. Датчики «Тележка впереди», «Тележка сзади» сигнализируют о наличии тележки в крайнем положении пути.
Схема управления в зависимости от поступающих на нее сигналов со счетчиков и датчиков наличия включает двигатели моста или тележки и управляет их реверсом. Исходные положения моста и тележки - крайние положения «сзади». В счетчиках величины хода моста записано число, соответствующее размеру опоки по ходу моста. Счетчик величины шага стоит на нуле. Схема управления подготовлена для пуска двигателя привода моста вперед.
В автоматическом режиме первым всегда начинает движение мост.
При включении программы I мост перемещается «шажками». Во время движения импульсы с датчика пути моста поступают в счетчик величины хода моста и через блок ввода программы - в счетчик величины шага. Как только мост пройдет расстояние, равное заданному шагу, со счетчика величины шага в схему управления поступит сигнал «Конец шага». По этому сигналу схема управления отключает двигатели привода моста, включает двигатели привода тележки вперед; счетчик величины шага устанавливается на нуль. Тележка сходит с датчика «Тележка сзади» и, пройдя путь, равный размеру опоки, достигает датчик «Тележка впереди». От этого датчика в схему управления поступает сигнал, по которому отключаются двигатели привода тележки, подготовляется включение двигателей привода тележки назад, включаются двигатели привода моста вперед. Мост делает второй шаг, по окончании которого тележка возвращается назад. Циклы повторяются до тех пор, пока счетчик величины хода моста не отсчитает полный ход моста, т. е. размер опоки по ходу моста независимо от сигнала «Конец шага». Со счетчика величины хода моста в схему управления выдается сигнал «Мост впереди», по которому отключаются двигатели привода моста, включаются двигатели привода тележки, счетчик величины шага устанавливается на нуль, схема управления подготавливает включение двигателей моста назад, счетчик величины хода моста устанавливается на нуль.
Циклы повторяются, причем мост перемещается «шажками» назад, тележка движется в челночном режиме (ход в одну сторону равен полному размеру опоки). По возвращении механизмов в исходное положение («Мост сзади», «Тележка сзади») заканчивается набивка одного слоя смеси. По этой программе в автоматическом режиме пескомет будет набивать слой за слоем, пока оператор не отключит его или не переведет на программу II до прихода механизмов в исходное положение. Изменить одну программу на другую можно в любой момент времени работы механизмов, но программа переключится только при исходном положении механизмов.
При включении программы II мост начинает движение, и с датчика пути моста импульсы поступают в счетчик величины его хода. При перемещении моста на расстояние, равное полному размеру опоки, со счетчика величины хода моста в схему управления поступает сигнал на отключение двигателя привода моста, включение двигателя привода, перемещающего тележку вперед, занесение информации в счетчик величины хода моста и подготовку включения двигателей привода моста, перемещающего его назад.
При движении тележки от датчика пути тележки через блок ввода программы в счетчик величины шага поступают импульсы пути тележки. При перемещении тележки на шаг счетчик величины шага выдает в схему управления сигнал «Конец шага». По этому сигналу отключаются двигатели привода тележки, включаются двигатели привода моста назад, счетчик величины шага устанавливается на нуле.
При включенной программе III («Контур») оба механизма перемещаются на расстояние, равное полному размеру опоки, так как счетчик величины шага заблокирован. При необходимости вместо счетчика можно установить два датчика: «Мост впереди» и «Мост сзади», что не влияет на функционирование системы. Аналогично, вместо двух датчиков наличия тележки впереди и сзади можно установить один счетчик пути тележки. Точность ходов тележки и моста обеспечивают датчики, выдающие импульсы через каждые 2,5 мм. Одному обороту вала двигателя соответствует путь в 20 мм. Для увеличения точности системы на вал посажено восемь лепестков; таким образом, ошибка не превышает 1/8 оборота вала двигателя.
Согласно таблицам триггеров в счетчики величины пути или шага может быть записан размер опоки или величина шага (мм) с учетом выбега моста или тележки после отключения двигателя. Для счетчика величины пути запись программы проводится согласно следующей таблице триггеров:
| Триггер | А2 | A3 | А4 | А5 | А6 | А7 | А8 | А9 |
| Путь, мм | 10 | 20 | 40 | 80 | 160 | 320 | 640 | 1280 |
При размере опоки 2000 мм и выбеге моста 50 мм в счетчик записывается число 2000 -50 = 1950 мм, которое с учетом таблицы может быть записано как 1280 + + 640+ 20+ 10 = 1950 мм. Таблица триггеров для счетчика величины шага:
| Триггер | Д11 | Д12 | Д13 | Д14 | Д15 |
| Шаг, мм | 10 | 20 | 40 | 80 | 160 |
В схеме заложены также значения наиболее часто используемых шагов - 150, 200 и 250 мм, задаваемых переключателем с пульта.
В системе предусмотрена коррекция траектории движения пескометной головки нажатием специальных кнопок крестовых переключателей, расположенных в подлокотниках кресла оператора, без переключения в наладочный режим. После коррекции заданной программой движение головки по заданной траектории продолжается с той точки, в которую головка была приведена во время коррекции. Информация в счетчиках при коррекции траектории не изменяется.