
| Главная |
| Поиск по сайту |
Адрес этой страницы' ?>
<<Предыдущая страница Оглавление книги Следующая страница>>
Дистанционное управление рукавным пескометом 2Б93М в следящем режиме.
Дистанционное управление рукавным пескометом 2Б93М в следящем режиме применено с целью исключить ручное вождение пескометной головки, требующее значительных усилий и связанное с определенной опасностью. Управление осуществляется со специального пульта, представляющего собой отдельно стоящее кресло оператора, с правой стороны которого размещена рукоятка в виде уменьшенной модели системы рукавов пескомета, с левой панель с кнопками управления и кулачковыми переключателями - ключами.
В следящем режиме управление движением большого и малого рукавов пескомета осуществляется с помощью системы сельсинов, обеспечивающей синхронную подачу сигнала, сила которого зависит от угла рассогласования. Передачу осуществляют два индукционных двигателя переменного тока (сельсин-датчик ВБ-404А и сельсин-приемник БС-404А), обмотки роторов которых соединены в звезду. Обмотки сельсинов-приемников питаются через блок фазочувствительного выпрямителя (усилителя), который служит для выпрямления и усиления сигнала, возникающего при рассогласовании между рукояткой управления и действительным положением рукавов пескомета. При повороте рукоятки на пульте управления выпрямленный и усиленный сигнал о наличии угла рассогласования поступает в следящий золотник типа 12Г68-12, который управляет приводами поворота рукавов, обеспечивая уменьшение угла, т. е. слежение за рукояткой, управляемой оператором.
На том же принципе основана работа сельсинов скребка, обеспечивающего подачу смеси к пескометной головке. Датчик-сельсин (БД-404А) механически связан со скребком, а электрически - с сельсином-приемником (БС-404А), укрепленным на панели пульта и конструктивно связанным со стрелкой-указателем положения скребка. Поворот стрелки влечет за собой соответствующий поворот скребка. При настройке следящей системы необходимо регулирование усиления сигнала, так как рукава пескомета по инерции могут иметь некоторое качание около согласованного положения, после того как рукоятка управления остановлена, особенно при наличии зазора в приводе поворота рукавов. При уменьшении коэффициента усиления качание рукава ликвидируется, однако при этом несколько снижается предельная скорость слежения и чувствительность системы.
Положение рукавов пескомета относительно рукоятки управления легко регулируют следующим образом:
устанавливают большой рукав пескомета в среднем положении, поворачивая большой рычаг рукоятки управления;
ослабляют контргайку на винте, являющемся продолжением вала ротора сельсина-датчика большого рукава, и удерживают ротор сельсина от проворачивания, вставив отвертку в шлиц винта;
устанавливают рычаг рукоятки в положение, соответствующее положению рукава пескомета; контргайку затягивают;
поворачивают малый рычаг рукоятки управления, устанавливая малый рукав пескомета в одну линию с большим;
аналогичным предыдущему образом малый рычаг рукоятки устанавливают в одну линию с большим рычагом (в соответствии с положением рукавов пескомета), удерживая ротор сельсина;
если большой или малый рукав пескомета не занимает устойчивого положения покоя, необходимо, ослабив контргайку, быстро повернуть ротор сельсина на 180° в любом направлении и вновь произвести регулирование.
Система имеет ручной режим управления, отключающий следящую систему. Движение рукавов пескомета осуществляется приводом, управляемым от соответствующих ключей на пульте.
Следящий золотник 12Г68-12 двухступенчатого типа с электроуправлением является главным элементом, преобразующим электрические сигналы в соответствующие движения рукавов пескомета через приводные гидроцилиндры. Схема устройства золотника приведена на рис. 4.
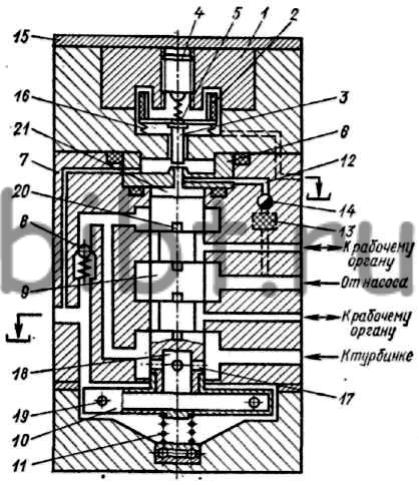
Рис. 4. Схема устройства следящего золотника типа 12Г68-12:
1 - магнит; 2 - катушка; 3 - игла; 4 - регулировочный винт; 5 и 11 - пружины; 6 - диафрагма; 7 - корпус; 8 - обратный клапан; 9 - золотник; 10 - турбинка; 12 - полость за дозатором; 13 - фильтр; 14 - дозатор (набор дроссельных шайб); 15 - крышка верхняя; 16 - пружина токопроводящая; 17 и 19 - радиальные отверстия; 18 - осевое отверстие; 20 - калиброванный паз; 21 - полость
Первую ступень включает электромеханический преобразователь (магнит, катушка и игольчатый клапан), вторую- распределительный золотник, нагруженный пружиной 11. Подвижная система преобразователя развивает усилие, пропорциональное напряжению, подаваемому на клеммы его катушки и нагружающему игольчатый клапан, в результате чего создается приращение давления масла в системе управления.
Для управления игольчатым клапаном в статическом состоянии требуется сила, наибольшее значение которой не превышает 0,40 Н. Уравновешивание давления масла на иглу в нулевом положении (при обесточенной катушке), равного 0,6 МПа, осуществляется пружиной 5 очень малой жесткости, что позволяет считать это давление постоянным и не зависящим от положения катушки. Регулировочный винт предназначен для первоначального регулирования пружины 5. Игольчатый клапан выполнен без уплотнения для уменьшения трения, поэтому возможно только вертикальное расположение золотника.
Приращение давления, создаваемое в первой ступени, вызывает смещение золотника во второй ступени, причем пружина 11 обеспечивает пропорциональность мощности на выходе золотника мощности входного электрического сигнала. Золотник имеет по своим кромкам калиброванные пазы, размеры которых подбираются в зависимости от давления в системе, расхода масла и нагрузки рабочего органа.
Золотник подпирает пружина 11. На верхний торец золотника действует давление, возникающее при протекании масла через полость 21 и игольчатый клапан на слив. Золотник устанавливается в положении, в котором давление масла на его верхний торец и усилие пружины 11 уравновешены. При изменении давления в полости 21 золотник сдвигается, проходные сечения по пазам изменяются, между полостями рабочего цилиндра создается перепад давления, и скорость поворота рукава устанавливается пропорционально перепаду давлений.
Золотник имеет возможность вращаться. Это исключает односторонний прижим его к корпусу или засорение щелей, при котором работа золотника нарушается. При вращении чувствительность золотника возрастает, и его смещение становится пропорциональным изменению давления в полости 21. Золотник вращается от турбинки за счет энергии потока масла, поступающего в турбинку из сливной магистрали через радиальные 17 и осевые 18 отверстия и далее в противоположно направленные отверстия 19. Частота вращения турбинки 300 об/мин при потере давления 0,1 МПа. Расход масла через турбинку постоянен, поэтому создающийся крутящий момент не зависит от положения золотника.
Время перемещения золотника из среднего положения в крайнее составляет 0,06 с и уменьшается при увеличении диаметра иглы и соответственно увеличении расхода масла в цепи управления.
Техническая характеристика золотника типа 12Г68-12
Рабочее давление наибольшее, МПа (кгс/см2) 6,3 (63)
Наибольший расход, л/мин (при перепаде давления на кромках
золотника, равном 1/3 наибольшего давления) 20
Наибольшая мощность сигнала управления при недифференцированной схеме электрооборудования, кВт 0,5
Расход масла в линии управления, л/мин 1,8
Напряжение входного сигнала наибольшее, В 7,5
Статическая нечувствительность, В 0,03
Утечка масла по кромкам золотника (при наибольшем давлении 2 МПа и входном напряжении, равном нулю), л/мин 2,0
Сопротивление обмотки катушки управления, Ом 110±5
Частота тока при сдвиге по фазе на 90°, Гц 55 и более
Мощность на выходе питающего насоса, кВт Не менее 2,55
Масса, кг 10