
| Главная |
| Поиск по сайту |
Адрес этой страницы' ?>
<<Предыдущая страница Оглавление книги Следующая страница>>
Кинематическая схема горизонтально-расточного станка 2А620Ф2-1 с ЧПУ. Привод радиального суппорта станка 2А620Ф2-1.
Кинематика станка 2А620Ф2-1. Главное движение шпиндель VII (рис. 72, б) получает от электродвигателя M1 (N=1,1 кВт, n = 1500 мин-1) через передачи z = 36-36 (включена муфта М1) или z = 32-40 (включена муфта М2), упругую муфту на валу III, защищающую от динамического воздействия, блоки зубчатых колес Б1 и Б2. С вала VI на шлицевой вал VIII и соответственно на шпиндель VII движение передается через передачу z = 30-86 при выключенной муфте М3 или через колеса z = 47-41 при включенной муфте. В первом случае получают нижний диапазон частот вращения, во втором-верхний. В результате переключения муфт М1, М2, М3 и блоков Б1 и Б2 шпиндель имеет 36 теоретических и 23 практических значения частот вращения. Уравнение кинематического баланса для минимальной частоты вращения шпинделя

Планшайба получает вращение по аналогичной кинематической цепи, но с вала VI на вал IX планшайбы движение передается через передачу z = 21-92 при включении муфты М4. При одной и той же наладке частота вращения планшайбы в 1,58 раза меньше частоты вращения шпинделя.
Шпиндельное устройство состоит из расточного и полого фрезерного шпинделя. Фрезерный шпиндель смонтирован в прецизионных подшипниках; расточной шпиндель, изготовленный из азотированной стали, перемещается внутри термически обработанных втулок, запрессованных во фрезерном шпинделе. В расточном Шпинделе зажим инструмента механизирован.
Увеличить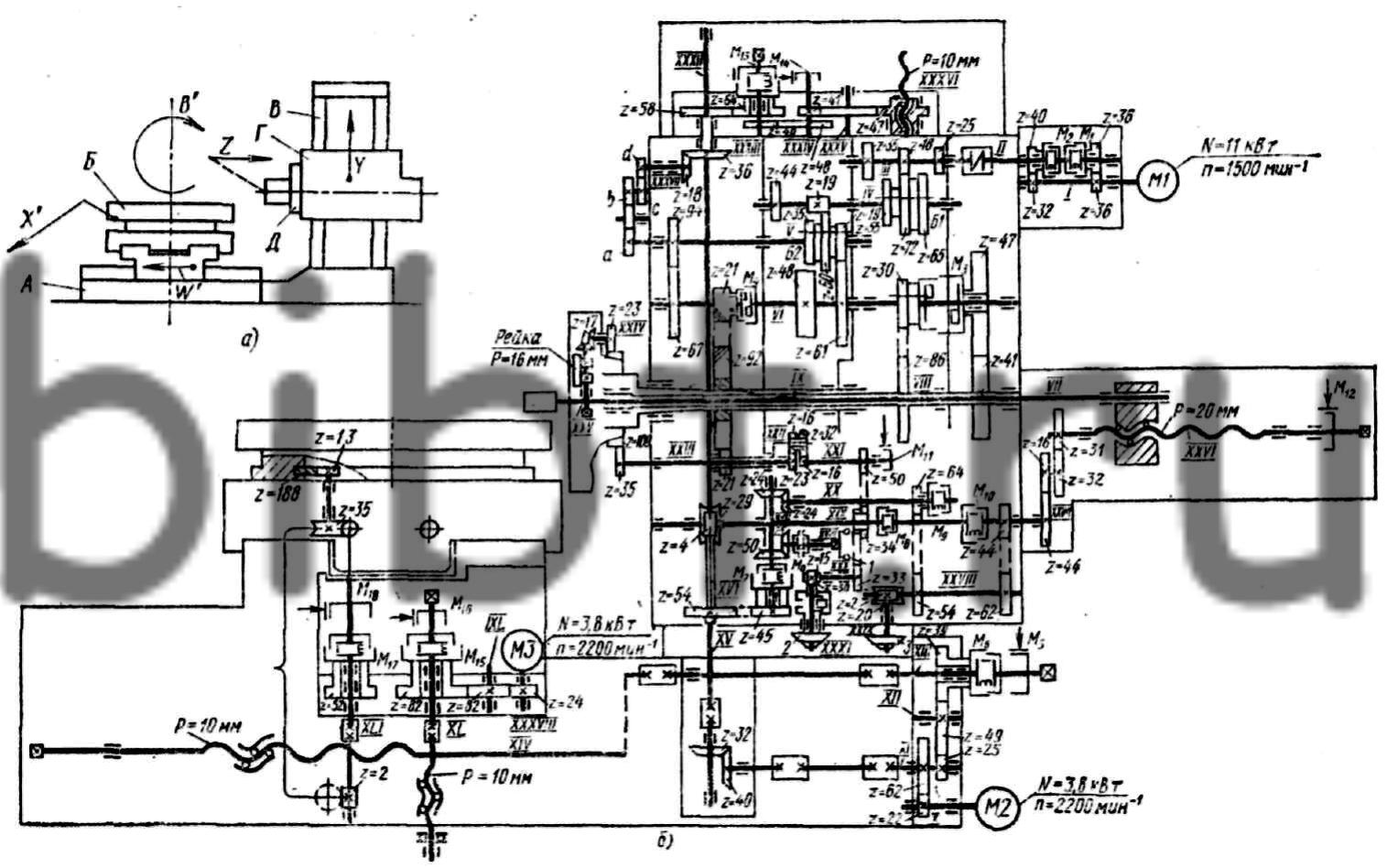
Рис. 72. Общий вид и кинематическая схема горизонтально-расточного станка 2А620Ф2-1 с ЧПУ
Движение подачи 2А620Ф2-1 осуществляется от двигателей постоянного тока М2 и М3 (N = 3,8 кВт, n = 2200 мин-1) с тиристорным управлением (диапазон регулирования 1:1000). Подвижные механизмы имеют высокоточные закаленные боковые направляющие качения и закрепляются автоматически. От двигателя М2 через редуктор получают осевое перемещение шпиндель, радиальное перемещение суппорт планшайбы, вертикальное перемещение шпиндельная бабка и продольное перемещение стол, от двигателя М3-поперечное перемещение и поворот стол.
Продольное перемещение стола осуществляется парой винт-гайка качения XIV, получающий вращение от вала X через передачи z = 22-62, 25-49, 49-39 при включенной муфте М5.
Вертикальное перемещение шпиндельная бабка получает от двигателя М2 через передачи z = 22-62, z = 40-32, z = 58-64 (при включенной муфте М13), z= 40-48, z = 41-47-47 и пару винт-гайка качения XXXVI с шагом Рх.в = 10 мм.
Уравнение кинематической цепи для вертикальной подачи

Для предотвращения падения шпиндельной бабки при обрыве троса противовеса имеется специальный механизм на валу XXXIV,
Осевая подача шпинделя осуществляется от вала X через передачи z = 22-62, z = 40-32, z = 4-29, вал XIX, муфту М10, зубчатые пары z = 44-16, z = 32 - 31 и передачу винт-гайку качения XXVI.
Уравнение кинематической цепи для минимальной осевой подачи

Нарезание резьбы можно осуществить или вращением шпинделя с одновременным продольным перемещением его, или радиальным суппортом планшайбы при продольном перемещении стола. В обоих случаях нужный шаг резьбы получают подбором сменных колес а, b, с, d.
Уравнение кинематической цепи нарезания резьбы при осевом перемещении шпинделя

где Рн.р - шаг нарезаемой резьбы.
Радиальное перемещение суппорта планшайбы осуществляется через дифференциальный механизм. Корпус дифференциала вращается от вала IX планшайбы через косозубую передачу z = 92- 21, а центральное зубчатое колесо дифференциала z = 16 на валу XXI получает вращение от приводного вала X через передачи z = 22-62, z = 40-32, z = 4-29, z = 64-50 (при включенной муфте М8). Дифференциал, суммируя оба эти движения, вращает вал XXIII и через передачи z = 35-100, z = 100-23 - вал XXIV, коническую пару z = 17-17 и червячно-реечную передачу перемещается радиальный суппорт планшайбы. Дифференциальный механизм обеспечивает перемещение суппорта во время вращения планшайбы с разными значениями подачи.
По формуле Виллиса определим передаточное число дифференциала

В данном случае n1, n4 и n0 - соответственно частоты вращения валов XXI, XXIII и поводка XXII с зубчатым колесом z = 21; числа зубьев колес в дифференциале z1 = 16, z2 = 32, z3 = 16, z4 = 23.
Таким
образом, 
Уравнение кинематической цепи радиальных подач в общем виде

Поперечное перемещение стола происходит от электродвигателя М3 через передачи z = 24-82-82 при включенной муфте М15 и винт - гайку качения Р = 10 мм.
Круговая подача стола осуществляется от электродвигателя М3 при включении муфты М17 через передачи z = 24-82-82-52, z = 2-35, z = 13-188. Во всех цепях подач имеются тормозные электромагнитные муфты (М5, М11, М12, M14, М16, М18).
Быстрое перемещение рабочих органов происходит от двигателей М2 и М3 при их разгоне до соответствующей частоты вращения.
Штурвальное устройство 1 позволяет осуществлять ручное тонкое перемещение шпинделя, радиального суппорта, шпиндельной бабки и продольное перемещение стола при включении муфты М7, а также быстрое перемещение выдвижного шпинделя при включении М9. Лимбы отсчета перемещений шпинделя 3 и радиального суппорта 2 кинематически связаны с приводом подач шпинделя и радиального суппорта. Муфта обгона Мо на валу XVIII отключает вращение штурвала 1 при механических подачах.
На рис. 73 изображен привод радиального суппорта 1 станка. Суппорт с червячной рейкой 9 получает перемещение через зубчатые колеса 3, 2, винт 4 и червяк 5, состоящий из двух частей. Осевой зазор между червяком и рейкой устраняют путем сближения частей червяка регулировочным винтом 8. Для этого предварительно с помощью винта 6 освобождается винт 8 от гребенки 7. Зазор регулируют, а затем фиксируют требуемое положение винта 8.
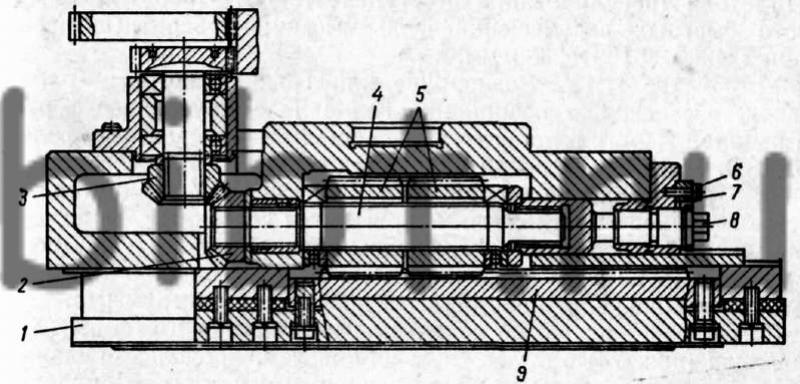
Рис. 73. Привод радиального суппорта станка 2А620Ф2-1