
| Главная |
| Поиск по сайту |
Адрес этой страницы' ?>
<<Предыдущая страница Оглавление книги Следующая страница>>
Кинематическая схема горизонтально-расточного станка 2611Ф2.
Кинематика станка 2611Ф2. Главное движение шпиндель IV получает от электродвигателя постоянного тока M1 (N = 8 кВт, n= = 1500 мин-1) через блоки зубчатых колес Б1 и Б2 и через передачу z = 22-74 (или 60-64). Муфта М1 и блоки Б1, Б2 переключаются электрогидравлическим механизмом. При переключений механических ступеней подача отключается, а при электрическом регулировании не отключается.
Учитывая, что диапазон регулирования двигателя n = 600- 3000 мин, запишем уравнение кинематической цепи для минимальной частоты вращения шпинделя

Направление вращения шпинделя изменяется реверсированием двигателя. Механизм главного привода защищен от динамического воздействия упругой муфтой на валу I. Зажим инструмента производится от пакета тарельчатых пружин, отжим - гидроцилиндром.
Подачи (рабочие и установочные) горизонтально-расточного станка 2611Ф2 подвижных органов осуществляются электродвигателями постоянного тока М2 и М3 типа ПБСТ-33 (N = 2,35 кВт, n = 3000 мин-1) с диапазоном регулирования 1 : : 750 для рабочих подач, при общем диапазоне регулирования 1 : : 2500, включая быстрые и установочные перемещения. Подача шпинделя, салазок стойки и шпиндельной бабки осуществляется электродвигателем М3, поперечное перемещение и поворот стола - электродвигателем М2.
Продольная подача салазок стойки осуществляется от вала XI, через передачи z = 27-81, z = 40-81 при включенной муфте М2 и ходовой винт XII с шагом Рх.в = 10 мм. Винт жестко скреплен с выходным валом редуктора, а гайка - с корпусом салазок стойки.
Увеличить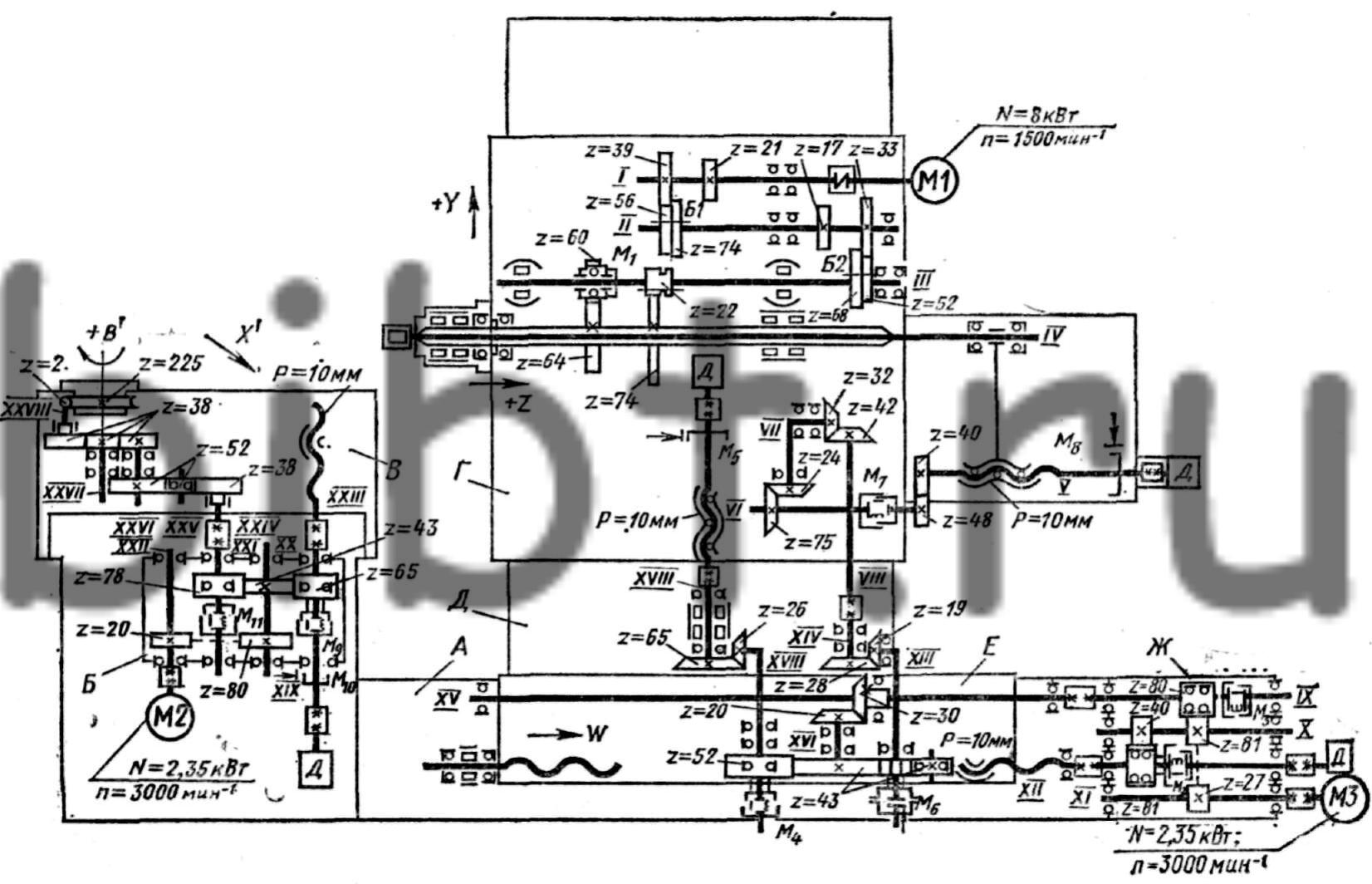
Рис. 74. Кинематическая схема горизонтально-расточного станка 2611Ф2 с ЧПУ
Вертикальная подача шпиндельной бабки происходит от вала XI через передачи z = 27-81, z = 81-80 при включенной муфте М3, конические зубчатые колеса с круговым зубом z = 30-20, через зубчатую пару z = 43-52 при включенной муфте М4, конические колеса с круговым зубом z = 26-65 и винт-гайку качения XVIII с шагом Р = 10 мм. Муфта М5 тормозная. Уравнение кинематического баланса для минимальной подачи шпиндельной бабки

где 1,2 - минимальная частота вращения электродвигателя.
Осевая подача шпинделя осуществляется от вала XI через передачи z = 27-81, z = 81-80 (включена муфта М3), z = 30-20, z = 43-43 (муфта M6 - шариковая предохранительная), конические пары с круговыми зубьями z = 19-28, z = 42-32, z = 24- 75, электромагнитную муфту М7, передачу z = 48-40 и пару винт- гайка качения V. На винте V расположена тормозная муфта M8.
Максимальная осевая подача шпинделя

где 900 - максимальная частота вращения электродвигателя.
Поперечная подача стола происходит от вала XXII через передачи z = 20-80, z = 43-65 при включенной электромагнитной муфте М9 и ходовой винт XXIII с шагом Рх.в = 10 мм. Муфта М10 тормозная. Со всеми ходовыми винтами жестко скреплены датчики положения - сельсины Д.
Поворот стола осуществляется от вала XXII через передачи z= 20-80, 43-78 (включена муфта М11), z = 38-52-52, z= 38-38-38, червячную пару z = 2-225. Для установки поворотного стола через 90° на салазках стола установлен индуктивный датчик, а на поворотном столе - четыре репера (магнитопривода). Конструкция реперов позволяет регулировать установку стола по углу в небольших пределах. При подходе в зону датчика стол перемещается на заранее заданной небольшой скорости. Все подвижные механизмы станка зажимаются пакетом тарельчатых пружин, отжимаются гидравликой.
Гидросистема станка осуществляет переключение механических ступеней главного привода; отжим подвижных органов станка, отжим инструмента в шпинделе.