
| Главная |
| Поиск по сайту |
Адрес этой страницы' ?>
<<Предыдущая страница Оглавление книги Следующая страница>>
Кинематика вертикального сверлильно-фрезерно-расточного полуавтомата 243ВМФ2 с ЧПУ. Шпиндель станка 243ВМФ2.
Кинематика станка 243ВМФ2 с ЧПУ (рис. 103, а). Главное движение шпиндель VII получает от асинхронного электродвигателя M1(N =2,2 кВт, n=1430 мин-1) через двухременной вариатор Вp, трехступенчатую коробку скоростей и зубчато-ременную передачу z = 31-31. При отклонении скорости от заданной программой тахогенератор ТГ даст команду на включение асинхронного электродвигателя М2 (N = 0,08 кВт, n= 1390 мин-1), который через зубчатые пары z = 17-49, z = 25-49 и винт XIII с шагом Р = 5 мм сместит ось подвижных дисков вариатора, что и изменит его передаточное отношение. Вариатор обеспечивает регулирование скорости (1:4) внутри каждого из трех диапазонов, получаемых переключением блока Б1 и муфты M1. При включении муфты М1 от электромагнита постоянного тока Э1 получают верхний диапазон частот вращения, так как движение с вала III на вал V передается через зубчато-ременную передачу z = 30-30, минуя понижающие передачи. Два нижних диапазона шпиндель получает при переключении блока Б1 (муфта М1 отключена) двумя электромагнитами постоянного тока (на схеме не показаны).
Шпиндель станка 243ВМФ2 8 (рис. 104) размещен в гильзе 7 на специальных высокоточных подшипниках. Зажим инструмента происходит от пакета тарельчатых пружин 3, действующих на инструмент с помощью шомпола 2, соединенного с байонетным замком 1. Усилие пружин регулируется гайкой 4. Зуб планки 5, взаимодействуя с зубчатым колесом 6, закрепленным на шомполе 2, препятствует случайному провороту байонета. Крутящий момент от шпинделя к инструменту передается поводками, расположенными на торце шпинделя.
Увеличить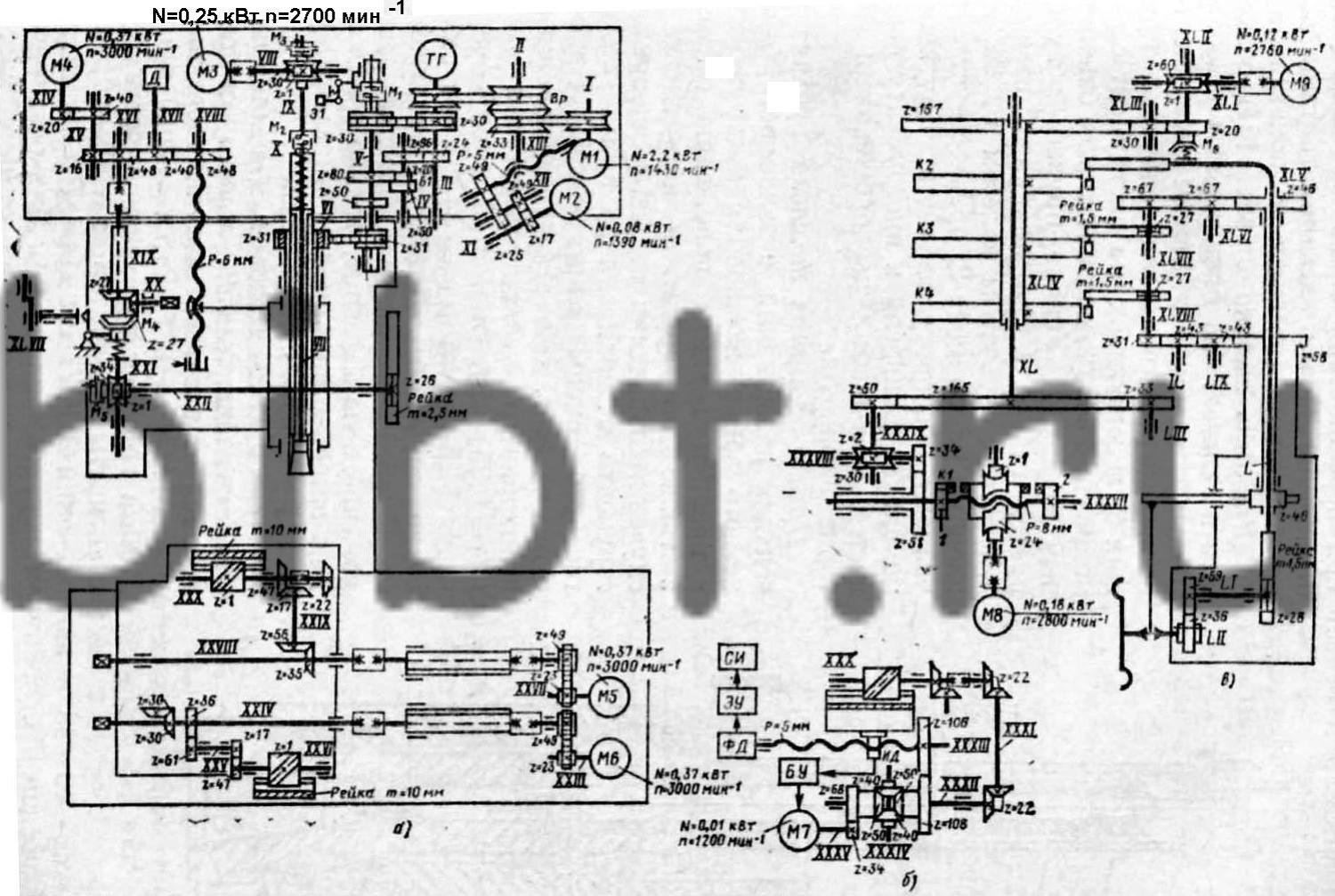
Рис. 103. Кинематическая схема вертикального сверлильно-фрезерно-расточного полуавтомата 243ВМФ2
Увеличить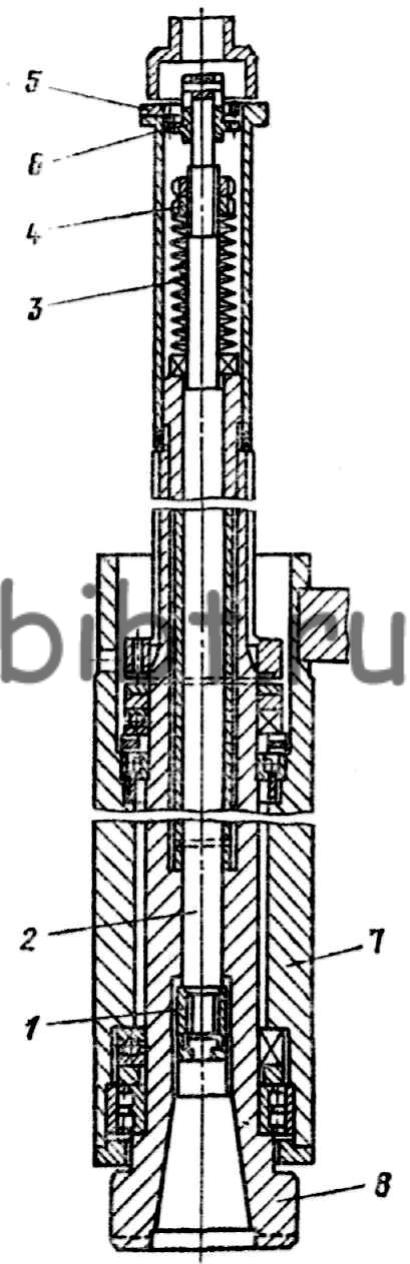
Рис. 104. Шпиндель станка 243ВМФ2
Привод вращения шомпола полуавтомата 243ВМФ2 с ЧПУ, предназначен для разжимания и зажимания байонетного замка шомпола с инструментом в крайнем верхнем положении гильзы, а также для вращения инструмента в случае несовпадения ведущих шпонок инструмента и шпинделя во время автоматической смены инструмента. Привод шомпола (рис. 103, а) осуществляется от асинхронного электродвигателя М3 (N = 0,25 кВт, n= 2700 мин-1) через червячный редуктор z = 1-30 при включенной муфте М2. Двигатель включается по команде микропереключателя, расположенного на магазине, только в положении автооператора под шпинделем. Муфта М3 - предохранительная.
Привод подач гильзы шпинделя и перемещения шпиндельной головки станка 243ВМФ2 с ЧПУ, осуществляется от электродвигателя постоянного тока М4 (N = 0,37 кВт, n= 3000 мин-1.) Гильза получает перемещение через двухступенчатый редуктор z = 20-40, z = 16-48-40-48 и винт качения XVIII с шагом Р =6 мм, который соединен с ползуном перемещения гильзы. Для обеспечения самоторможения пары винт-гайка качения при отжиме инструмента служит тормоз.
Перемещение шпиндельной головки осуществляется от шлицевого вала XVI через втулку XIX и при включенной муфте М4 через червячную пару z = 1-34 (муфта M5 предохранительная) и реечную передачу. Муфта М4 включается от механизма зажима головки. Гильза и шпиндельная головка перемещаются синхронно. При отключении муфты М4 шпиндельная головка останавливается а шпиндель продолжает перемещаться, осуществляя рабочую подачу. На валу XVII установлен круговой фотоэлектрический датчик с дискретностью 0,01 мм, который осуществляет контроль перемещений гильзы и шпиндельной головки.
Скорость быстрого перемещения шпиндельной головки определится из выражения

Головка и гильза уравновешены противовесами.
Позиционирование по заданной программе осуществляется продольным перемещением стола и поперечным перемещением салазок от электродвигателей постоянного тока соответственно М5 и М6 (N = 0,37 кВт; n= 3000 мин-1). Движение передается через зубчатые ремни z =23-49, две зубчатые пары на червячно-реечные передачи с модулем m= 10 мм. Продольная подача стола в общем виде определится из выражения

Измерительные винты отсчетно-измерительных систем кинематически связаны с приводными червяками через колесо z = 22 на приводном валу XXX продольного перемещения и z = 30 на валу XXIV.
Отсчетно-измерительная система станка 243ВМФ2 замкнутая с индуктивными и фотоэлектрическими датчиками. Рассмотрим принцип ее действия на примере отсчетной системы стола (рис. 103, б). Точный винт-якорь с прямоугольной резьбой XXXIII индуктивного датчика ИД связан с перемещением рабочего органа через червячно-реечную передачу, вал XXX, конические пары z = 22-22, z = 22-22, колеса дифференциала z = 40, z = 50, z = 108 и колесо z = 106. Возникающий при перемещении сигнал рассогласования воспринимается блоком управления БУ, дающим команды электродвигателю М7 типа РД-09 (N=0,01 кВт, n=1200 мин-1). Двигатель, уменьшая сигнал рассогласования, доворачивает винт-якорь XXXIII через передачу z = 34-68, дифференциал и колесо z = 106 отсчетного винта. Вследствие обратной связи винт-якорь вращается синхронно движению рабочего органа. Отсчет угла поворота винта-якоря производится круговым фотоэлектрическим датчиком ФД. Возникающий в фотодиодах электрический ток преобразуется электронным устройством ЭУ в импульсы, воспринимаемые счетчиком импульсов СИ. Шаг импульсов фотоэлектрического датчика соответствует 0,001 мм перемещения рабочего органа (дискретность отсчета). Счетчик импульсов формирует в числовом виде полную информацию о величине перемещения рабочего органа и управляет соответственно электродвигателем М5 привода подач стола.
Для компенсации погрешностей отсчетно-измерительной системы (неточность нарезки винта-якоря, его биение и т. д.) служит коррек-ционное устройство, состоящее из коррекционного индуктивного датчика и коррекционной линейки.