
| Главная |
| Поиск по сайту |
Адрес этой страницы' ?>
<<Предыдущая страница Оглавление книги Следующая страница>>
Виды движений в промышленных роботах. Системы координат промышленных роботов.
Движения в промышленных роботах разделяют на транспортирующие в направлениях XX; ZZ; φху; φzx; ориентирующие в направлениях δ и φyz и координатное движение Y-Y. Ориентирующие движения придают захватному устройству необходимое положение в заданной точке рабочей зоны. Транспортирующие движения определяются размерами звеньев исполнительного механизма и служат для перемещения захватного устройства в различные точки рабочего пространства. Координатные движения обеспечивают перемещение ПР между отдельными производственными позициями. Эти перемещения превышают размеры самого ПР и обслуживаемого им оборудования.
Рабочие движения промышленных роботов направлены на удержание объекта и перемещение его в заданных направлениях. Установочные движения необходимы для удобства выполнения операций и увеличения зоны обслуживания.
Системы координат промышленных роботов определяют его компоновочную схему и соответственно кинематику и форму рабочей зоны. Роботы могут работать в прямоугольной декартовой, цилиндрической, сферической, угловой и комбинированной системе координат (табл. 3).
3. Система координат промышленных роботов и примеры компоновки
| Система координат | Система основных координат перемещений | Эскиз рабочей зоны | Пример компоновки и структурной кинематичecкoй схемы |
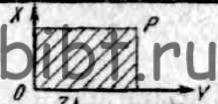
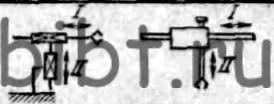
Прямоугольная плоская |
 |
 |
 |
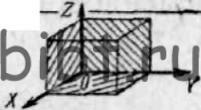
Прямоугольная пространственная |
 |
 |
 |
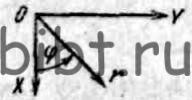
Полярная плоская |
 |
 |
 |
Полярная цилиндрическая |
 |
 |
 |
Полярная сферическая |
 |
 |
 |
Угловая |
 |
 |
 |
В прямоугольной (декартовой) системе координат звенья механической системы имеют прямолинейные перемещения по трем (или двум - при плоской системе) взаимно перпендикулярным осям X, Y, Z. Рабочая зона промышленных роботов имеет форму прямоугольника или параллелепипеда (размеры H, L, L1 определяют параметры рабочей зоны).
В плоской полярной системе координат объект перемещается в одной координатной плоскости и его положение определяется величиной радиуса-вектора r и углом поворота радиуса-вектора φ.
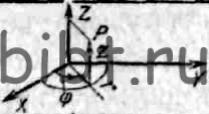
Цилиндрическая система координат характеризуется перемещением рабочего органа промышленного робота в основной координатной плоскости в направлениях r и φ, а также по координате Z. Рабочая зона в этом случае имеет форму цилиндра, размеры H, L и угол φ определяют ее параметры.
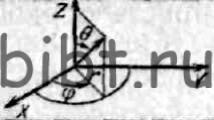
Сферическая система координат характеризуется перемещением рабочего органа в точку пространства за счет перемещений по радиусу-вектору r и угловым перемещениям φ и θ в двух взаимно перпендикулярных плоскостях. Рабочая зона ПР имеет в этом случае форму шара.
Угловая плоская или пространственная (цилиндрическая и сферическая) система координат характерна для движения многозвенных шарнирных рук ПР. Объект манипулирования перемещается в направлении радиуса-вектора r за счет относительных угловых поворотов звеньев руки, имеющий постоянную длину. Увеличивается число моделей так называемых «антропоморфных» ПР, имитирующих движение руки человека и работающих в угловой системе координат. Такие ПР имеют только вращательные пары, что увеличивает зону обслуживания, маневренность и функциональные возможности.