| Главная |
| Поиск по сайту |
Адрес этой страницы' ?>
<<Предыдущая страница Оглавление книги Следующая страница>>
РАЗДЕЛ IV ПРОМЫШЛЕННЫЕ РОБОТЫ
ГЛАВА 24. ОСНОВНЫЕ ОПРЕДЕЛЕНИЯ, НАЗНАЧЕНИЕ, КЛАССИФИКАЦИЯ И ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ПРОМЫШЛЕННЫХ РОБОТОВ
§ 1. ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
Промышленные роботы являются представителями машин-манипуляторов, которые предназначены для выполнения двигательных функций, аналогичных функциям руки человека. Манипуляторы с ручным управлением (биотехнические) управляются оператором дистанционно или непосредственно путем перемещения рабочего органа.
К автоматическим манипуляторам относятся автооператоры, промышленные роботы и интерактивные роботы.
Автооператор - это неперепрограммируемый автоматический манипулятор.
Промышленный робот (ПР) - автоматическая машина, представляющая собой совокупность манипулятора и перепрограммируемого устройства управления для выполнения в производственном процессе двигательных и управляющих функций, заменяющих аналогичные функции человека при перемещении предметов производства и (или) технологической оснастки. Перепрограммируемость - это свойство робота заменять управляющую программу автоматически или оператором.
Существуют роботы, которые попеременно управляются то оператором, то автоматически. В них имеется устройство памяти для автоматического выполнения отдельных действий.
Применение промышленных роботов в значительной степени решает вопрос развития комплексной автоматизации производства с возможностью его быстрой переналадки на выпуск нового вида продукции. ПР освобождает рабочего от неквалифицированного монотонного и вредного для здоровья труда, улучшает условия безопасности рабочих и высвобождает их для выполнения новых народнохозяйственных задач.
Применение ПР позволяет повысить производительность труда в 2-3 раза, увеличить сменность работы оборудования и улучшить ритмичность. Сегодня ПР в машиностроении выполняют погрузочно-разгрузочные, транспортно-складские работы, обслуживают станки, прессы, литейные машины и т. д., а также они могут выполнять сварочные, сборочные, контрольно-измерительные, окрасочные и другие основные операции.
Промышленные роботы широко применяют в горнодобывающей, металлургической, нефтяной и других отраслях промышленности. Их используют в медицине, в сфере обслуживания, при исследовании океанов и т. д. Во всех случаях ПР позволяют автоматизировать на их основе производство со всеми вытекающими отсюда технологическими, организационными, психологическими и социально-экономическими аспектами.
Структурная схема промышленного робота представлена на рис. 165. Исполнительное устройство ПР выполняет все его двигательные функции. В исполнительное устройство входит манипулятор и в общем случае устройство передвижения промышленного робота. Манипулятор состоит из несущих конструкций, приводов, исполнительных и передаточных механизмов. Каждая степень подвижности манипулятора имеет свой двигатель (пневматический, электрический, гидравлический). В ПР часто используют волновые и планетарные редукторы, что позволяет уменьшить объем и массу сборочной единицы при высоком коэффициенте передачи. В промышленный робот малой грузоподъемности используют традиционные зубчатые редукторы, а в тяжелых ПР - зубчатые редукторы в сочетании с винтовой парой.
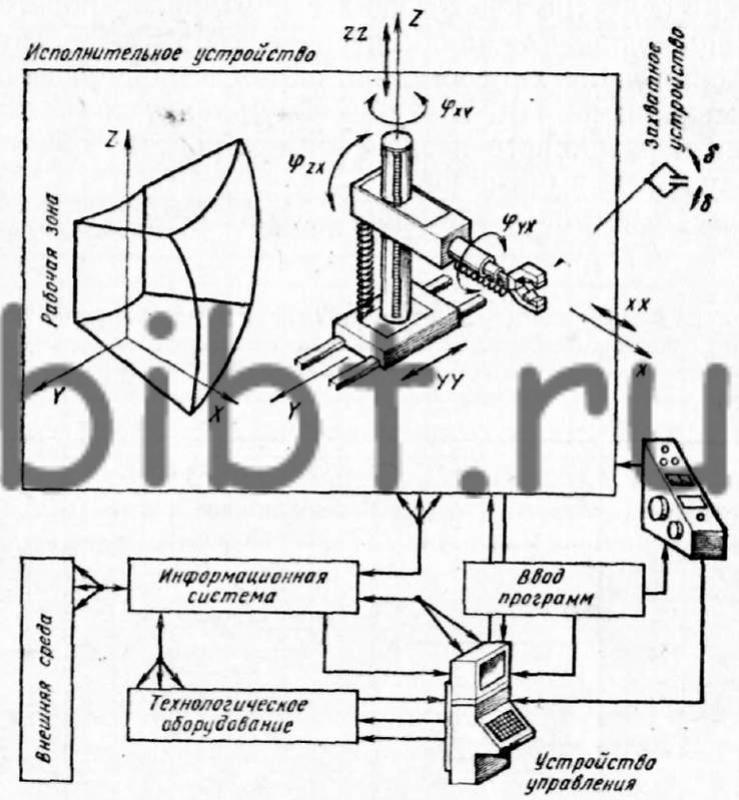
Рис. 165. Структурная схема промышленного робота
Исполнительный механизм промышленного робота (механическая рука) осуществляет ориентирующие и транспортирующие движения. Чаще всего он имеет шарнирное исполнение. Рабочим органом ПР является захватное устройство (сварочные клещи, окрасочный пистолет, сварочный инструмент и т. д.). Захватное устройство захватывает и удерживает объекты, перемещаемые манипулятором. Современные промышленные роботы комплектуют набором типовых захватных устройств.
Устройство управления ПР служит для формирования и выдачи управляющих воздействий исполнительному устройству в соответствии с управляющей программой. В устройство управления, как правило, входят: пульт управления; запоминающее устройство, в котором хранятся программы и другая информация; вычислительное устройство и блок управления приводами манипулятора и устройства передвижения. Устройство управления используют обычно и для технологического оборудования, работающего совместно с данным промышленного робота, или совместно работающих с ним других роботов.
Информационная система обеспечивает сбор и передачу в устройство управления данных о состоянии окружающей среды и функционировании механизмов ПР. В эту систему входит комплект датчиков обратной связи различного назначения, устройство обратной связи, устройство сравнения сигналов.
Некоторые элементы кинематической схемы промышленных роботов приведены в табл. 2.
2. Условные обозначения элементов схем роботов и манипуляторов
Элемент |
Эскиз |
Захватное устройство |
|
Соединения звеньев: |
|
жесткое |
|
Соединение звеньев: |
|
подвижное с перемещением вдоль прямоугольных направляющих |
|
цилиндрическое |
|
плоское шарнирное |
|