
| Главная |
| Поиск по сайту |
Адрес этой страницы' ?>
<<Предыдущая страница Оглавление книги Следующая страница>>
Типаж промышленных роботов. Робототехнические транспортные тележки.
Типаж промышленных роботов определяют исходя из следующих технических характеристик и параметров: назначения ПР, грузоподъемности, рабочей зоны, числа степеней подвижности, возможности передвижения (мобильности), компоновочной схемы, конструктивного исполнения, вида управления, иногда точности позиционирования (дополнительная характеристика).
Компоновочная схема и конструктивное исполнение промышленных роботов зависят от применяемой системы координат (см. табл. 3), назначения ПР, особенностей обслуживаемого оборудования, числа позиций и их расположения. Так, в компоновках модуля «станок-робот» промышленного робота (рис. 166, а) перемещает заготовку по трем координатам, подавая ее из загрузочной позиции 1 в рабочую позицию 2 станка, затем ПР снимает деталь и переносит ее в разгрузочную позицию 3. Промышленный робот, изображенный на рис. 166, б, имеет еще одну степень подвижности - поворот на 180° захватного устройства вокруг вертикальной оси, что позволяет обработать заготовку с двух сторон. Перегрузочная позиция 4 позволяет совместить транспортирование заготовки, находящейся на позиции 1 и детали (поз. 3) со временем ее обработки на станке. У ПР на рис. 166, в применено двухзахватное устройство, что дает возможность совмещения времени транспортирования детали и заготовки.
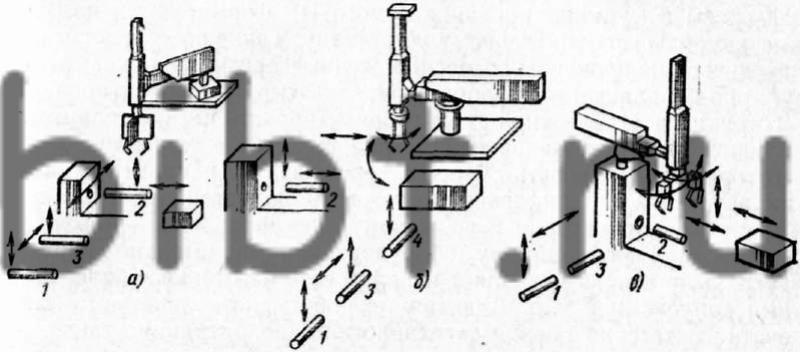
Рис. 166. Схемы компоновок модуля «станок-робот» промышленного робота.
Ф2 - с позиционной системой ПУ, 80 - индекс схемы компоновки; 01 - конструктивное исполнение.
Каждая компоновочная схема может быть выполнена в нескольких конструктивных исполнениях. Каждой модификации внутри кода основной модели присваивается двухзначный номер 01-99.
В типаж внесены напольные роботы (с горизонтальной выдвижной рукой и консольным механизмом подъема, с горизонтальной выдвижной рукой и подъемной кареткой, с качающейся выдвижной рукой, с многозвенной рукой), портальные роботы, манипуляторы с ручным управлением и т. д.
Индексация моделей промышленных роботов проводится в следующем порядке:
1) целевое назначение;
2) вид оборудования;
3) грузоподъемность;
4) тип системы ПУ;
5) условная компоновочная схема;
6) исполнение.
Например, модель СМ40Ф2.80.01 расшифровывается следующим образом: СМ - станочный манипулятор; 40 - грузоподъемность;
Робототехнические транспортные тележки служат для передачи обрабатываемых заготовок от центрального стеллажа-накопителя к конвейеру-накопителю или приемно-передающим устройствам станков и рабочим позициям операторов и обратно. Траектория перемещения транспортной тележки зависит от кабеля, проложенного в полу цеха. По кабелю пропускают переменный ток, создается магнитное поле, которое взаимодействует с витками катушек индуктивности, размещенных в тележке. При этом вырабатывается сигнал, который подается в электронное устройство рулевого управления, и определяется направление движения.