
| Главная |
| Поиск по сайту |
Адрес этой страницы' ?>
<<Предыдущая страница Оглавление книги Следующая страница>>
Кинематика шестишпиндельного токарного пруткового автомата 1Б265-6К. Главное движение.
Главное движение. Рабочие шпиндели XXVII получают вращение от электродвигателя M1 (N =30 кВт, n=1460 мин-1) через клиноременную передачу со шкивами D = 190 мм и D = 308 мм, зубчатую пару z = 35 - 56, сменные колеса a-b,c-d, центральный вал IV и косозубое колесо z=48, зацепляющееся с пятью колесами z=43. Поставляемый со станком набор сменных колес обеспечивает 29 значений частот вращения шпинделя.
Уравнение кинематической цепи вращения рабочих шпинделей

Инструментальный быстросверлильный шпиндель XXIX получает вращение от рабочего шпинделя через колеса z = 43 - 48, вал IV, колеса z =48 - 29 и сменное колесо m. Соответственно частота вращения быстросверлильного шпинделя

Со станком поставляются сменные колеса m=29, 36, 43, 53, 55, 73. Благодаря паразитному колесу z = 29 инструментальный шпиндель вращается в направлении, обратном шпинделю заготовки, поэтому относительная частота вращения при сверлении определится из выражения nотн=nсв+nшп.
Развертывание может осуществляться по цепи быстрого сверления, но при этом устанавливается еще одно паразитное колесо для обеспечения нужного направления вращения инструментального шпинделя.
Увеличить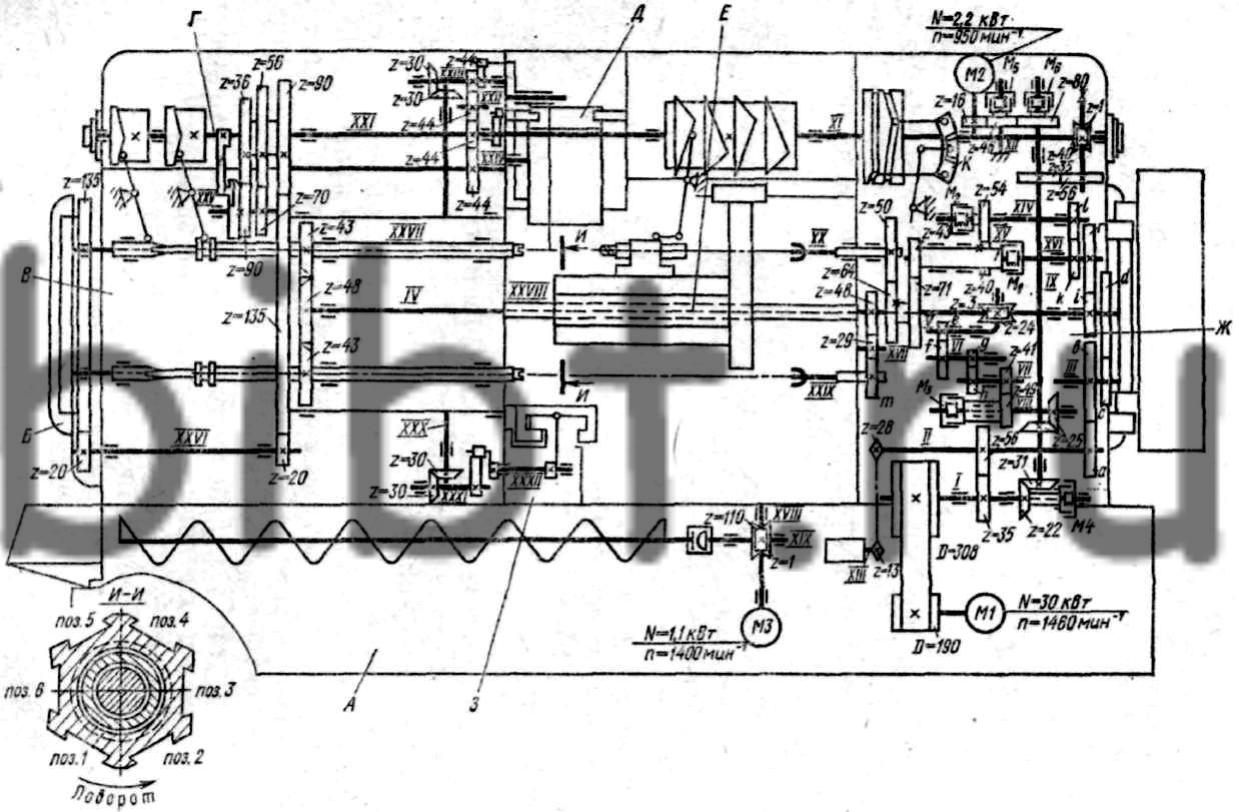
Рис. 41. Кинематическая схема шести шпиндельного токарного пруткового автомата 1Б265-6К