
| Главная |
| Поиск по сайту |
Адрес этой страницы' ?>
<<Предыдущая страница Оглавление книги Следующая страница>>
Кинематическая схема токарного патронного полуавтомата 1725МФ3. Движения подачи. Механизм крепления инструментального блока.
Кинематика станка 1725МФ3. Главное движение передается шпинделю III от электродвигателя постоянного тока M1 (N = 30 кВт, n = 1000 мин-1) через поликлиновую ременную передачу с диаметрами шкивов 200 ... 250 мм, зубчатую пару z = 29-46 и блок зубчатых колес Б1, переключаемый автоматически от устройства ЧПУ с помощью гидроцилиидра Ц1.
Увеличить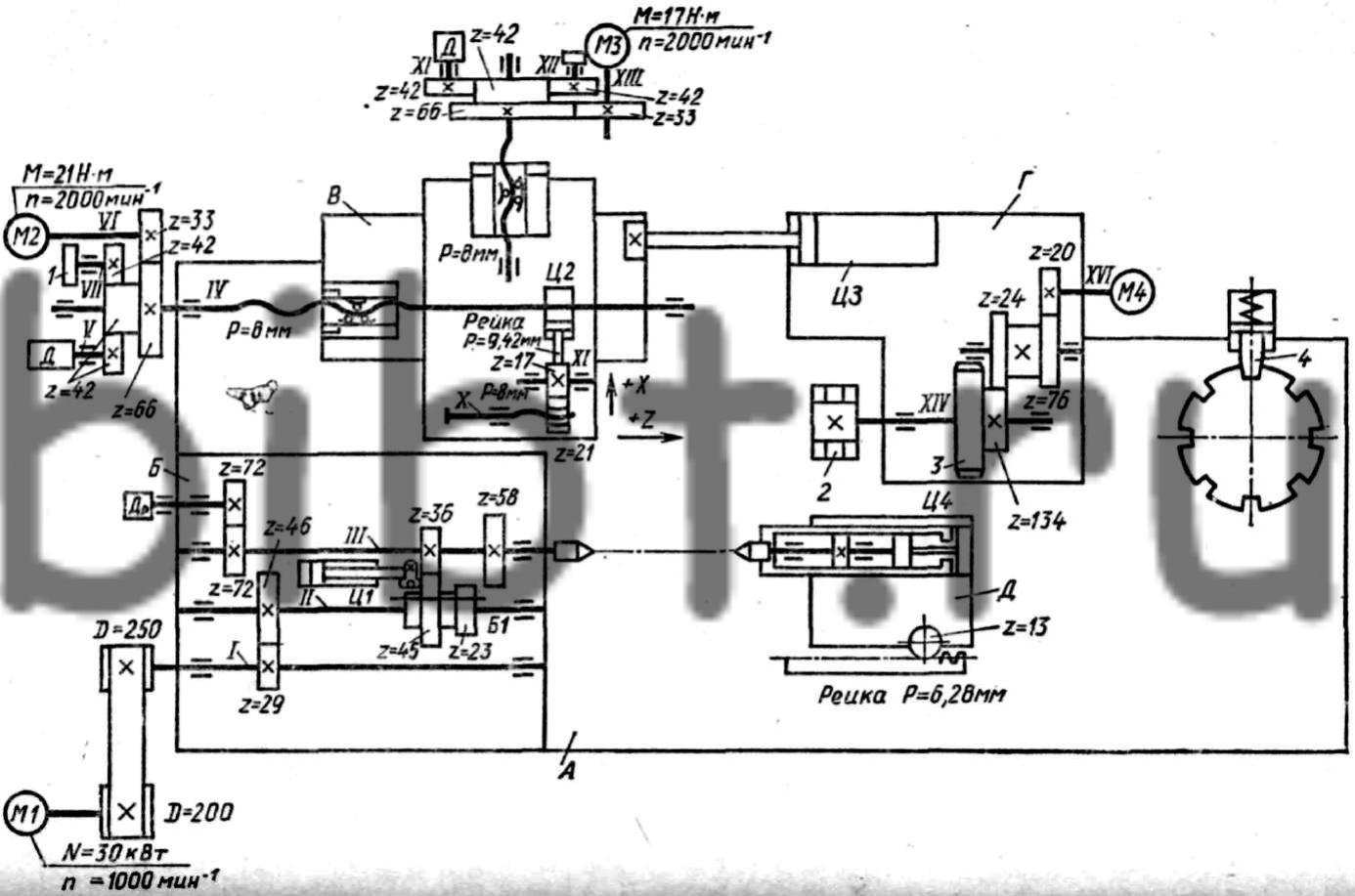
Рис. 61. Кинематическая схема токарного патронного полуавтомата 1725МФ3
Двигатель M1 имеет пределы частот вращения 180-4000 мин-1, тогда минимальная частота вращения

За счет переключения блока Б1 получаем два диапазона частот вращения: 35 ... 800 и 112 ... 2500 мин-1.
На шпинделе установлено колесо z = 72 привода датчика резьбонарезания Др. Шпиндель смонтирован в подшипниках качения: двухрядном роликоподшипнике и упорно-радиальном подшипнике в передней опоре и двухрядном роликоподшипнике в задней опоре. Такая конструкция позволяет шпинделю выдерживать большие нагрузки без вибраций.
Движения подачи полуавтомата 1725МФ3 происходят от высокомоментных электродвигателей постоянного тока М2 и М3. Продольная подача осуществляется от двигателя М2 (М=21 Н*м; n=2000 мин-1) через беззазорный редуктор z = 33-66 и винт-гайку качения IV с шагом P=8 мм. Выбор зазора в зубчатой паре происходит за счет качания двигателя с плитой посредством эксцентрика, смонтированного в крышке корпуса. Выбор зазора в зубчатой паре z = 42-42 привода датчика Д обратной связи (резольвера) осуществляется посредством эксцентрикового фланца.
Управление приводом подач осуществляется: по пути - от резольвера и по скорости - от тахогенератора, встроенного в электродвигатель. На валу VII установлен фланец 1 с упором, взаимодействующим с бесконтактным путевым выключателем.
Поперечная подача по координате X происходит от двигателя М3 (М=17 Н*м, n= 2000 мин-1), в остальном привод аналогичен приводу продольной подачи. На ползуне смонтирован механизм крепления инструментальных блоков.
Зажим и разжим инструментального блока осуществляется от гидроцилиндра Ц2 через шток-рейку z=17 и зубчатое колесо z = 21, выполненное в виде гайки. Колесо-гайка, вращаясь, перемещает ходовой винт X с Т-образным концом, который, находясь в Т-образном пазу инструментального блока, тем самым зажимает его на призмы. При зажиме блока дополнительно происходит его осевая фиксация (осевой замок) с помощью гидравлического плунжера (на рис. 61 не показан). Зажим и разжим блока контролируется двумя микропереключателями.
Конструктивное исполнение механизма крепления инструментального блока показано на рис. 62.
Механизм расположен в корпусе суппорта 10. Через шток-рейку 7 и зубчатое колесо 3 вращается колесо-гайка 1. При этом перемещается винт 2, который Т-образным концом прижимает блок 9 к призмам. При обратном движении штока гидроцилиндра происходит разжим инструмента. Зажим и разжим блока контролируются микровыключателями, с которыми взаимодействуют кулачки 8 и 5. Эти кулачки закреплены на фланце 6, получающем вращение через зубчатые колеса 3 и 4.
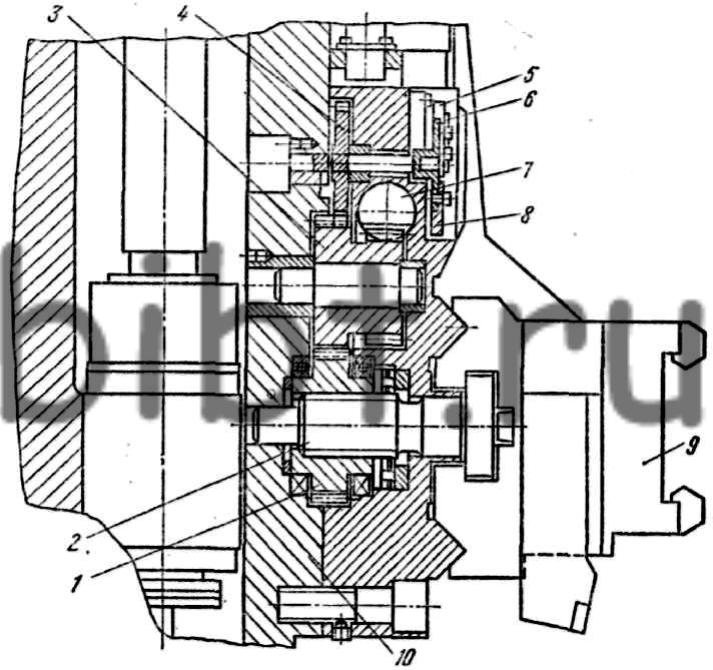
Рис. 62. Механизм крепления инструментального блока полуавтомата 1725МФ3