
| Главная |
| Поиск по сайту |
Адрес этой страницы' ?>
<<Предыдущая страница Оглавление книги Следующая страница>>
Кривошипно - шатунный механизм. Эксцентриковый механизм.
Одним из самых распространенных механизмов преобразования движения является кривошипно - шатунный механизм. Он применяется для преобразования вращательного движения в возвратно-поступательное, и наоборот, возвратно-поступательного во вращательное.
Кривошип совершает непрерывное вращение, ползун возвратно-поступательное движение, а шатун - сложное плоско - параллельное движение.
При повороте кривошипа на равные углы ползун проходит неравные участки пути - это легко обнаружить, если на одном чертеже изобразить механизм в последовательно занимаемых им положениях. Таким образом, равномерное вращение кривошипа преобразуется в неравномерное возвратно-поступательное движение ползуна.
Разновидностью кривошипно-шатунного механизма является эксцентриковый механизм (рис. 226). Роль кривошипа в этом механизме выполняет эксцентрик 1, укрепленный на ведущем валу. Эксцентрик - это диск, ось вращения которого не совпадает с геометрической осью. В отличие от кривошипно-шатунного эксцентриковый механизм необратим, т.е. он позволяет преобразовать вращательное движение в возвратно-поступательное, но не наоборот.
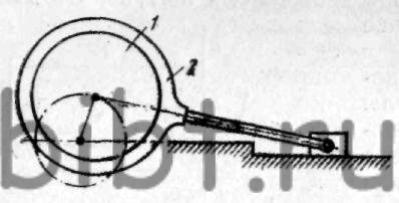
Рис. 226. Схема эксцентрикового механизма:
1 - эксцентрик, 2 - хомут
Выше мы отмечали, что в кривошипно-шатунном механизме ползун перемещается неравномерно, однако характер его движения при перемещении от крайнего левого положения до крайнего правого в точности соответствует обратному движению-от правого до левого положения.
В отдельных случаях желательно получить иную картину движения ползуна. Например, в поперечно-строгальном станке необходимо иметь различные скорости рабочего и холостого ходов резца, совершающего возвратно-поступательное движение. В этом случае в качестве механизма преобразования вращательного движения вала электродвигателя в возвратно-поступательное движение резца применяют кривошипно-кулисный механизм (рис.227).
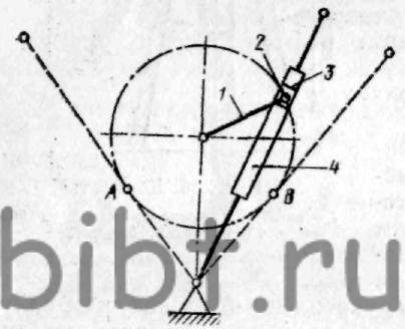
Рис. 227. Схема кривошипно-кулисного механизма:
1 - кривошип, 2 - палец, 3 - ползун, 4 - рычаг
Вокруг неподвижной оси вращается кривошип 1, на конце которого имеется палец 2. На палец свободно насажен ползун 3, скользящий в продольном прямолинейном пазу, прорезанном в рычаге 4 (кулисе). При вращении кривошипа ползун скользит в пазу кулисы и поворачивает ее вокруг неподвижной оси. При перемещении пальца из положения А в положение В кулиса перемещается из крайнего левого положения в крайнее правое, а при дальнейшем перемещении пальца из положения В в положение А кулиса совершает обратный ход. Так как углы поворота кривошипа, на конце которого находится палец, при этом не равны, то и время, а следовательно, и скорости движения кулисы будут различны. В итоге резец, связанный с концом кулисы, будет совершать медленный рабочий ход и быстрый - холостой.
Наибольшую возможность осуществлять любой закон движения ведомого звена при непрерывном равномерном вращения ведущего позволяют кулачковые механизмы.