
| Главная |
| Поиск по сайту |
Адрес этой страницы' ?>
<<Предыдущая страница Оглавление книги Следующая страница>>
Кинематическая схема зубофрезерного полуавтомата 53А20Ф4 с ЧПУ. Главное движение. Движения подачи.
Кинематика полуавтомата 53А20Ф4 выполнена с жесткой связью в цепи деления и безгитарной наладкой связей вращения заготовки и инструмента, перемещений инструмента и заготовки. Согласование движений в полуавтомате осуществляется дополнительным вращением дифференциала, встроенного в кинематическую цепь деления. Скорости вращения привода дифференциала согласованы с вращением и перемещением инструмента через интерполяторы устройства ЧПУ.
Главное движение зубофрезерного полуавтомата 53А20Ф4 осуществляется от двигателя постоянного тока M1 (N = 7 кВт, n=1200 мин-1), питаемого от тиристорного преобразователя. Движение шпинделю фрезы передается через зубчатую пару z = 36-36, блок Б1, зубчатые пары z = 23-23, z = 23-23, z = 25-100. При переключении блока Б1 получаем два диапазона частот вращения фрезы 80-180 мин-1 и 181-300 мин-1. Частота вращения фрезы определяется по формуле

где fv - частота управления приводом фрезы; iБ1 - передаточное отношение блока Б1; 2,5 - передаточное число мультипликатора резольвера главного привода; 200 - коэффициент деления шага (взят из характеристики устройства ЧПУ); 4 - постоянное передаточное число зубчатых колес привода.
Тогда частота управления приводом (Гц)
На шпиндель VI насажен маховик со встроенным в него фрикционным тормозом. Тормоз состоит из зубчатых колес z=21-86 с передаточным отношением на 0,1 больше, чем передаточное отношение колес z=25-100, что заставляет их вращаться с проскальзыванием относительно маховика, в котором находятся прижимные кулачки. Усилие прижима кулачков к фрикционному диску, жестко сидящему на колесе z=86, регулируется пружинами.
Увеличить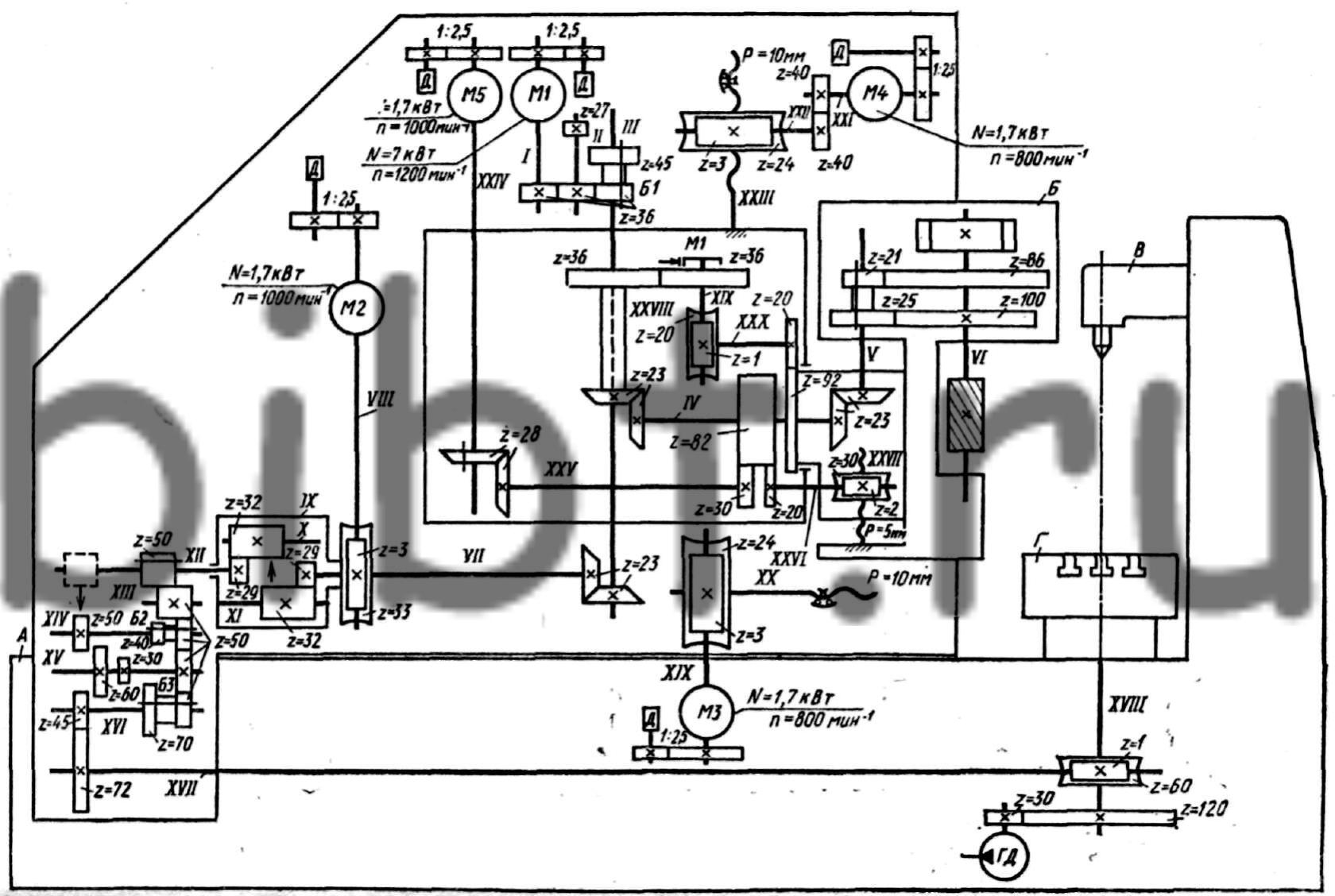
Рис. 149. Кинематическая схема зубофрезерного полуавтомата 53А20Ф4 с ЧПУ
Движения подачи зубофрезерного полуавтомата 53А20Ф4 . В качестве приводов подач по координатам X, Y, Z, W' на станке используются высокомоментные двигатели постоянного тока.
Радиальная подача фрезы (координата X) осуществляется от электродвигателя М3 (N = 1,7 кВт, n=800 мин-1) через червячную передачу z = 3-24 и винт-гайку качения с шагом Р = 10 мм. Частота управления приводом радиальной подачи fx определяется из уравнения кинематического баланса между частотой вращения двигателя М3 и радиальной подачей Sx от ходового винта:
Дискретность перемещения по координате X

Вертикальная подача фрезы (координата Y) осуществляется от электродвигателя M4 (N = 1,7 кВт, n= 800 мин-1) через передачи z=40-40, z=3-24 и винт - гайку качения о шагом Р=10 мм.
За один оборот стола фреза проходит вдоль оси колеса путь, равный величине вертикальной подачи SY, за это же время фреза сделает z/z1 оборотов, где z - число нарезаемых зубьев, z1 - число заходов фрезы.

откуда
где fY - частота управления приводом
вертикальной подачи, Гц. Дискретность перемещения по координате Y

Тангенциальная подача фрезы (координата Z) осуществляется электродвигателем М5 (N = 1,7 кВт, n=1000 мин-1), М= 17 Н*м) через зубчатые пары z = 28-28, z = 30-82, z = 82-20, червячную передачу z = 2-30 и винт - гайку качения с шагом Р = = 5 мм. Уравнение кинематического баланса связывает вращение фрезы с ее перемещением SZ (мм) за один оборот стола (фреза за это время сделает z/z1 оборотов). Тогда

Дискретность перемещения по координате Z
