
| Главная |
| Поиск по сайту |
Адрес этой страницы' ?>
<<Предыдущая страница Оглавление книги Следующая страница>>
§ 2. ВИДЫ СИСТЕМ УПРАВЛЕНИЯ ПРОМЫШЛЕННЫХ РОБОТОВ.
Промышленные роботы управляются от автономных, комплексных и многоуровневых систем. Автономные системы используют для управления только промышленными роботами. В этих целях применяют как устройства управления станками, так и специализированные. Специализированные устройства для ПР отличаются возможностью программирования методом обучения, дополнительными модулями измерения показателей состояния внешней среды и механизмов робота, большим числом входов-выходов для связи с основным и вспомогательным оборудованием и т. д. Комплексные системы управления управляют комплекс «оборудование-промышленный робот». В этом случае обычно используют серийно выпускаемые станочные системы ЧПУ, но это целесообразно только при возможности применения метода обучения при подготовке программ как для станка, так и для робота. Многоуровневые системы ЧПУ нужны там, где промышленные роботы обслуживает станки, входящие в автоматизированные участки, управляемые от ЭВМ (такие системы будут рассмотрены ниже).
Наиболее распространены в промышленности автономные унифицированные системы управления ПР, разработанные странами СЭВ.
Сюда относятся цикловые системы позиционного управления серии УЦМ (УЦМ-10, УЦМ-20, УЦМ-30, УЦМ-663), числовые устройства позиционного управления серии УПМ (УПМ-331, УПМ-552 и УПМ-772), системы контурного управления серии УКМ (УКМ-552 и УКМ-772).
Структурная схема устройства ЦПУ УЦМ-20 приведена на рис. 167. Программа задается штекерами. Команды формируются в блоке формирования команд на основе информации, поступающей от блоков задания программ и управления. Формирователь временных интервалов обеспечивает выдержки времени между отработкой отдельных кадров управляющей программы. Устройство может управлять семью координатами, число точек позиционирования по координатам до трех. Промышленные роботы, комплектуемые таким устройством, имеют ограниченные функциональные возможности. Их применяют в крупносерийном и массовом производстве для обслуживания литейного и кузнечно-прессового оборудования, металлорежущих станков и т. д.
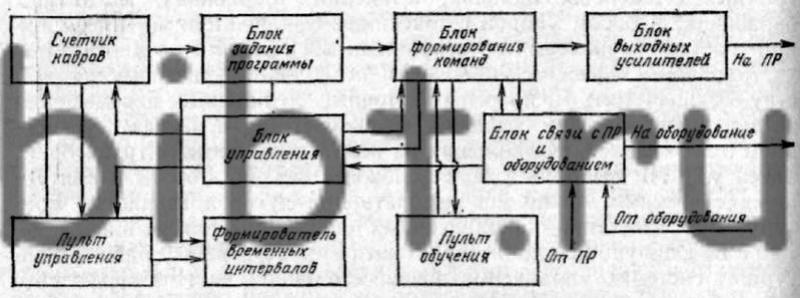
Рис. 167. Схема устройства циклового программного управления УЦМ-20
Числовые системы позиционного управления типа УПМ комплектуются с ПР, обслуживающими металлорежущие станки, подъемно-транспортные операции, простейшие сборочные работы и др. Технологическая информация включает до шести-десяти команд, программирование осуществляется методом обучения. Информация с пульта обучения и пульта управления записывается в оперативную память устройства, для длительного хранения ее можно переписать на магнитную ленту кассетного накопителя.
Контурные устройства ЧПУ типа УКМ-552 и УКМ-772 управляют промышленными роботами, обеспечивающими сложные перемещения рабочего органа по заданной траектории. Они выполнены на базе микро-ЭВМ «Электроника-60», программоноситель - гибкие магнитные диски. Устройство УКМ-552 предназначено для ПР, используемых в процессе окраски. Число управляемых координат до пяти. На внешнее оборудование может выдаваться до восьми управляющих команд. Устройство УКМ-772 управляет промышленным роботом, обеспечивающим процесс дуговой сварки. Число управляемых координат до семи, на внешнее оборудование может выдаваться до 32 управляющих команд.