
| Главная |
| Поиск по сайту |
Адрес этой страницы' ?>
<<Предыдущая страница Оглавление книги Следующая страница>>
ГЛАВА 26. КОНСТРУКЦИИ ПРОМЫШЛЕННЫХ РОБОТОВ
§ 1. ПРИВОДЫ ПРОМЫШЛЕННЫХ РОБОТОВ
Промышленные роботы-выполняют с электромеханическим, гидравлическим, пневматическим и комбинированным приводом. Выбор типа привода определяется назначением ПР, его техническими характеристиками, в частности грузоподъемностью, конструктивными особенностями, условиями эксплуатации, видом системы управления. Привод промышленного робота должен иметь высокое быстродействие, минимально возможные габаритные размеры, высокую надежность, высокие энергетические показатели; обеспечивать точность позиционирования и возможность работы в режиме автоматического управления. Следует учесть, что привод работает в условиях сильно меняющейся нагрузки, что связано с изменением геометрии ПР в процессе работы.
Для упрощенных промышленных роботов с цикловым управлением и грузоподъемностью до 20 кг применяют пневмопривод. Преимущества пневмопривода - простота, надежность, высокая точность в режиме управления по упорам, возможность работы во взрывоопасных средах, в средах повышенной запыленности, меньшая стоимость по сравнению с другими типами привода. Недостатки привода - низкий КПД, значительные колебания скорости исполнительных механизмов при изменяемой нагрузке. Принципиальная схема позиционного пневмопривода ПР представлена на рис. 168. Шток 4 пневмоцилиндра 5, управляемого пневмораспределителем 6, передает движение через рейку 3 зубчатому колесу 2. На одном валу с зубчатым колесом закреплен электромагнитный тормоз 1, изменением питающего напряжения которого регулируется тормозящий момент. При позиционировании датчик положения дает предварительную команду на торможение, затем за счет увеличения тормозного момента скорость привода сбрасывается до «ползучей» и происходит медленный подход к заданной точке позиционирования.
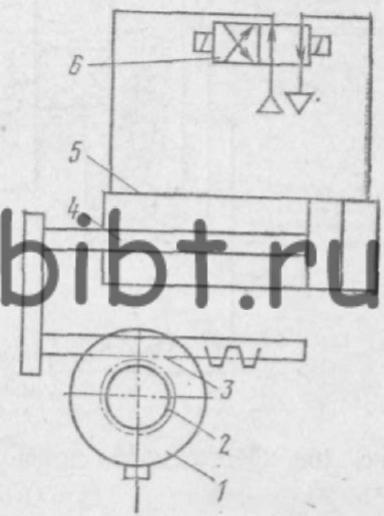
Рис. 168. Принципиальная схема позиционного пневмопривода ПР
Для промышленных роботов с грузоподъемностью свыше 10-20 кг в основном применяют гидропривод. Гидропривод имеет высокую энергоемкость, быстродействие, стабильность скорости при изменяющейся нагрузке, малую инерционность, высокую точность позиционирования и т. д. Недостаток гидропривода - возможность утечек. В гидроприводах цикловых промышленных роботов в качестве исполнительных устройств применяют гидроцилиндры, гидродвигатели с ограниченным углом поворота выходного вала, гидромоторы. В промышленных роботах с числовыми системами ПУ используют электрогидравлические следящие приводы с линейными гидроцилиндрами (типа ПЭГС) или гидродвигателями (типа СП), имеющие датчики обратной связи по положению. Могут применяться и электрогидравлические шаговые приводы, в этом случае звенья ПР оснащаются дополнительными датчиками положения.
Электропривод обладает высокой надежностью, точностью, бесшумностью, легкостью регулирования, простотой монтажа, уменьшением металлоемкости конструкций ПР. Наиболее подходят для промышленных роботов электродвигатели постоянного тока с возбуждением от постоянных магнитов, имеющие сравнительно высокие показатели удельной мощности. Используют для промышленных роботов электродвигатели с плоским ротором, малоинерционные высокомоментные электродвигатели, шаговые приводы с усилителями моментов и силовые.
Электропривод (рис. 169) содержит механическую передачу, электродвигатель, чувствительные устройства в виде датчиков положения и скорости и блок позиционирования, включающий схемы сравнения сигналов по положению и скорости, схему ограничения, определяющую максимальную скорость, и усилитель мощности.
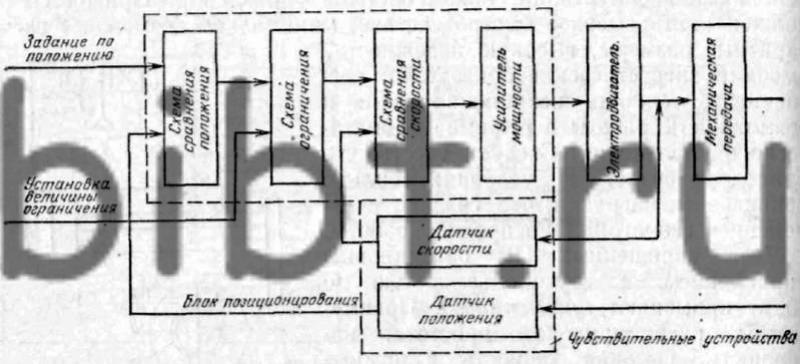
Рис. 169. Обобщенная схема электропривода промышленного робота