
| Главная |
| Поиск по сайту |
Адрес этой страницы' ?>
<<Предыдущая страница Оглавление книги Следующая страница>>
§ 2. ЗАХВАТНЫЕ УСТРОЙСТВА ПРОМЫШЛЕННЫХ РОБОТОВ. Механические захватные устройства.
Захватные устройства (ЗУ) предназначены для захвата и удержания объектов манипулирования. Современные промышленные роботы комплектуют типовым набором стандартных захватных устройств, для специальных промышленных роботов захватные устройства могут проектироваться индивидуально. Захватные устройства должны обеспечивать надежный захват и удержание деталей различных по массе, размерам и конструкции (в пределах предусмотренных параметрами робота); стабильность базирования; быстроту переналадки; они не должны повреждать деталь в месте захвата.
На конструкцию захватных устройств влияют система ЧПУ, вид обслуживаемого оборудования, тип робота, серийность производства. Например, робот, обслуживающий группу станков в серийном производстве, должен иметь широкодиапазонные захватные устройства или их автоматическую смену. Захватные устройства для обслуживания патронных токарных станков отличаются по конструкции от захватных устройств, обслуживающих центровые станки. На рис. 170 показана схема работы захватного устройства 6 с зажимными губками 5 при установке заготовки 2 в патрон 1 токарного патронного станка с ЧПУ. Упор 3 с помощью пружины 4 поджимает деталь по торцу в момент смены баз. Одна из конструкций захватного устройства для установки валов в центрах токарного станка приведена на рис. 171.
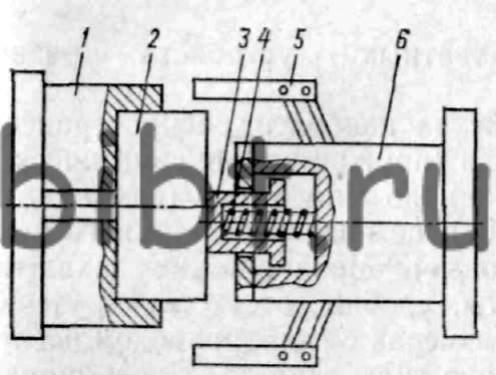
Рис. 170. Захватное устройство для установки заготовки в патрон токарного станка с ЧПУ
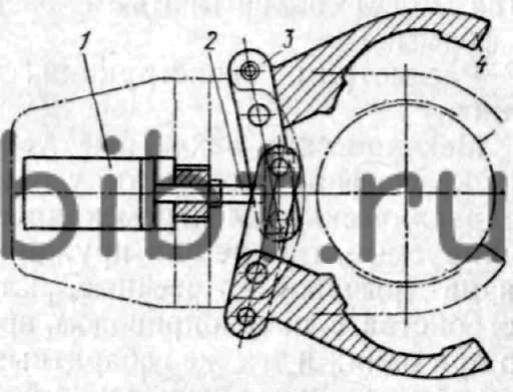
Рис. 171. Захватное устройство с пневмоприводом
Классификация захватных устройств промышленных роботов проводится по многим признакам. Остановимся на некоторых из них. По принципу действия различают захватные устройства механические, магнитные, вакуумные, с эластичными камерами, деформирующимися под действием нагнетаемого внутрь воздуха или жидкости. Захватные устройства всех четырех групп могут быть одно-, двух- и многозахватными.
По характеру базирования различают захватные устройства центрирующие, определяющие положение оси или плоскости симметрии захватываемой заготовки; базирующие, определяющие положение базовой поверхности; перебазирующие; фиксирующие положение объекта, которое тот имел в момент захвата.
По характеру крепления различают захватные устройства несменяемые, сменные, быстросменные, с автоматической сменой.
По виду управления захватные устройства делят на неуправляемые, командные, жесткопрограммируемые, адаптивные. К неуправляемым относятся, например, захватные устройства с постоянными магнитами: чтобы освободить заготовку из захватного устройства, нужно приложить силу, большую, чем сила удержания. Командные захватные устройства получают команды только на захват или отпускание объекта. Жесткопрограммируемые захватные устройства управляются устройством ПУ, определяющим в зависимости от программы величину перемещения губок, силу зажима, взаимное расположение рабочих элементов и т. д. Адаптивные захватные устройства также управляются устройством ПУ и оснащаются датчиками, дающими информацию об объекте и внешней среде, например, о форме поверхности объекта манипулирования или об усилии, возникающем в месте захвата, и т. д. Элементы адаптации предусмотрены, например, в захватном устройстве робота УМ160Ф281.01 (см. рис. 182). Применяют «антропоморфные» захватные устройства, имитирующие кисть руки человека. Например, трехпалое устройство такого типа благодаря сгибанию «фаланг пальцев» может обеспечить 11 степеней подвижности. Каждое звено управляется отдельно и приводится в движение электродвигателями постоянного тока. Такие устройства могут захватывать и базировать детали разных размеров и формы.
Рассмотрим конструкции захватных устройств разных типов.
Механические захватные устройства промышленных роботов наиболее распространены. Их классифицируют по типу привода (пружинные, пневматические, гидравлические, электромеханические), по типу губок (жесткие, регулируемые, гибкие или пружинящие); по виду передаточного механизма (рычажные, реечные, клиновые). Механические захватные устройства с пневмоприводом просты, удобны, отсутствуют утечки, но при одних и тех же габаритных размерах с гидроприводом последний обеспечивает значительно большие силы захвата. Пневмопривод к тому же в отличие от гидропривода не позволяет точно регулировать силу зажима. Рычажное захватное устройство с пневмоприводом для деталей цилиндрической формы показано на рис. 171. На штоке 2 пневмоцилиндра 1 расположены рычаги 3, несущие зажимные губки 4, которые могут быть постоянными или сменными. Профиль губок обеспечивает центрирование захватываемых деталей в широком диапазоне.
Реечные захватные устройства по сравнению с рычажными имеют меньшие габаритные размеры, обеспечивают большее раскрытие губок, однако развивают меньшие силы зажима.
Захватные устройства с электромеханическим приводом встречаются реже. Для заготовок небольшой массы и габаритных размеров могут использоваться захватные устройства одностороннего действия, в которых губки раскрываются или закрываются пружиной.
Чтобы не повредить деталь при зажиме, часто применяют гибкие, эластичные или силораспределяющие захватные устройства. Для взятия хрупких предметов используют губки в виде надувных подушек или надувных пальцев (рис. 172, а). Пальцы выполнены из резины цельными с постепенным переходом тонкостенной части 4 в гофрированную 3 и толстостенную часть 2 (рис. 172, б). При подаче воздуха через канал 1 тонкостенная часть пальца удлиняется больше, чем гофрированная и утолщенная, поэтому происходит деформирование пальцев по линии 5 и зажим детали.
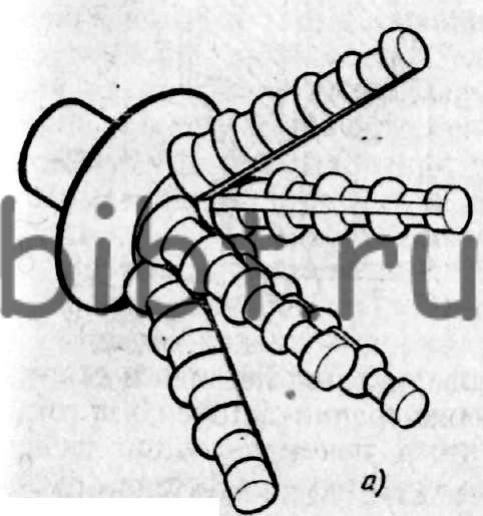
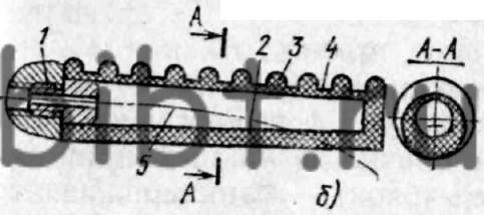
Рис. 172. Захватное устройство с надувными пальцами