
| Главная |
| Поиск по сайту |
Адрес этой страницы' ?>
<<Предыдущая страница Оглавление книги Следующая страница>>
Вакуумные и магнитные захватные устройства промышленных роботов. Захватные устройства с эластичными камерами.
Вакуумные и магнитные захватные устройства промышленных роботов. Вакуумные захваты пригодны для захвата деталей из различных материалов, не имеющих плоскую и ровную поверхность. Их делят на пассивные с простыми присосами, изготовляемыми из резины или пластических материалов, и активные с принудительным поддержанием вакуума в удерживающей чаше. Вакуум-присос для плоских деталей показан на рис. 173. Отсосом воздуха через штуцер 2 создается разряжение между деталью и резиновой прокладкой 5, приклеенной к чашке 4. Чашка может вертикально перемещаться в корпусе 3 для компенсации погрешности позиционирования. Возврат в исходное положение осуществляется пружиной 1. Вакуумные захватные устройства имеют пониженную точность базирования из-за эластичности присосок.
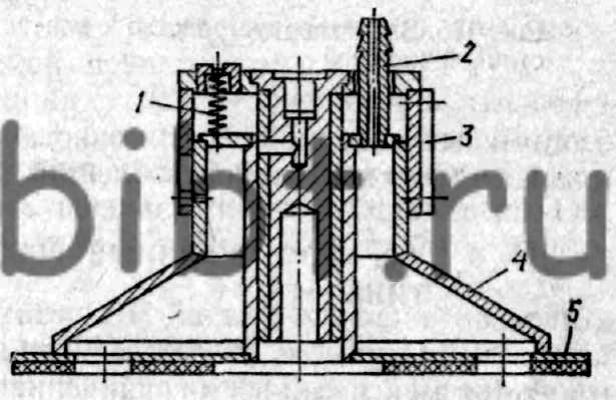
Рис. 173. Вакуумприсос
Магнитные захватные устройства могут иметь постоянные магниты или электромагниты (первые распространены мало, так как для высвобождения детали нужны специальные устройства). Захватные устройства такого типа пригодны только для намагничивающихся материалов, они имеют простую конструкцию, обладают быстродействием, обеспечивают высокую точность базирования. Электромагнитные захватные устройства компонуют часто из небольших электромагнитов, расположенных на общей раме. На рис. 174 изображено электромагнитное захватное устройство, центрирующее детали по оси симметрии.
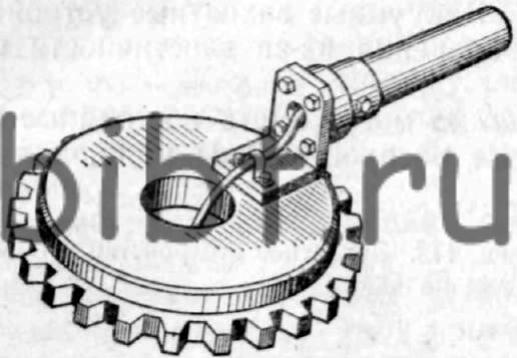
Рис. 174. Электромагнитное захватное устройство
Захватные устройства с эластичными камерами промышленных роботов (рис. 175) применяют для переноса хрупких небольших деталей неправильной формы или с большими отклонениями размеров. На корпус 1 надета камера 4, выполненная из эластичного материала, например резины. Камера крепится к корпусу накидной гайкой 2 через промежуточное кольцо 3 и винтом 5. При подаче сжатого воздуха через отверстия в корпусе камера раздувается, центрируется и удерживает захватываемую деталь за отверстие. Такие захватные устройства могут удерживать детали и за наружную поверхность.
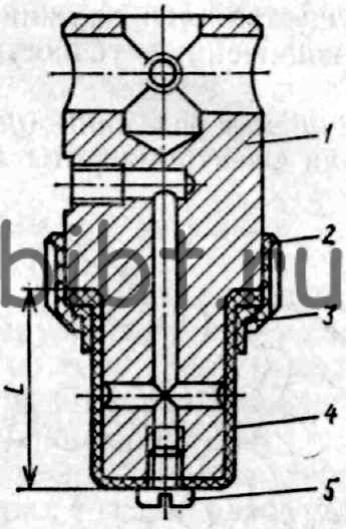
Рис. 175. Захватное устройство с эластичной камерой
Захватные устройства с приспособлениями для выполнения технологических операций расширяют область применения промышленных роботов. К таким приспособлениям относятся средства запрессовки для выполнения монтажных работ; сопла для очистки поверхностей деталей и станка сжатым воздухом; приспособления для измерения деталей и т. д.