
| Главная |
| Поиск по сайту |
Адрес этой страницы' ?>
<<Предыдущая страница Оглавление книги Следующая страница>>
§ 3. ПРОМЫШЛЕННЫЕ РОБОТЫ АГРЕГАТНО-МОДУЛЬНОГО ТИПА.
Одним из наиболее важных направлений робототехники является максимальное ограничение конструкций выпускаемых промышленных роботов. Этому способствует унифицированный блочно-модульный принт построения промышленных роботов. Конструктивный модуль (блок) - функционально и конструктивно независимая единица, которую можно использовано как индивидуально, так и в различных комбинациях с другими модулями. Промышленные роботы модульной конструкции получают путем соединения автономных модулей, при этом число степеней подвижности и кинем тическую схему выбирают согласно конкретным условиям применения промышленного робота. Модульный принцип построения позволяет сократить сроки и затраты на изготовление, освоение и внедрение в эксплуатации ПР, упростить их конструкцию. Модульные промышленные роботы надежнее универсальных, так как конструкция модулей обычно хорошо отработана. Промышленные роботы модульного типа можно легко перестроить для использования на других работах.
Для разработки агрегатно-модульных ПР используют следующие типовые модули: несущие металлоконструкции (основание, рельсовые пути и т. д.); набор захватных механизмов; механизмы рабочих перемещений с приводами (механизмы подъема, поворота, подъема и поворота, поворота и перемещения, вращения, качания, выдвижения, выдвижения и вращения и т. д.); модули отдельных блоков или в целом управляющих устройств ПР; модули, обеспечивающие перемещение ПР.
Базовый кинематический модуль включает привод, аппаратуру управления и клеммные разъемы для подсоединения к устройству управления. В модулях с ПУ применяют обычно следящие приводы с обратной связью по положению. При использовании электропривода не требуются гидравлические разъемы высокого давления и, следовательно, упрощаются коммуникации между модулями.
Унификация и нормализация основных параметров и механизмов промышленных роботов. Грузоподъемность, характеризующая гамму ПР, построенных по агрегатно-модульному типу, может относиться лишь к базовым моделям или к наиболее характерным модификациям. Это связано с тем, что масса механизмов промышленного робота, которая влияет на его грузоподъемность, может значительно меняться при замене одной сборочной единицы другой или замене привода и т. д.
Энергетические показатели модулей (мощность, сила, крутящий момент) устанавливают при разработке параметрических рядов агрегатных систем. В пределах отдельных агрегатных гамм регламентируют скорости и перемещения.
Захватные устройства агрегатных промышленных роботов нормализуют по грузоподъемности, размерам захватываемой поверхности.
Важная задача - нормализация стыковых элементов и присоединительных размеров сборочных единиц, так как компоновка модульного робота содержит от одного до семи основных модулей, при этом число приводов может достигать восьми. Системы управления промышленных роботов, комплектующие агрегатную гамму ПР, также должны быть унифицированы.
Компоновки гаммы агрегатных промышленных роботов можно условно разделить на две группы:
1) Промышленные роботы, построенные на базе одной принципиальной компоновки (однотипные роботы);
2) Промышленные роботы, построенные по различным компоновочным схемам на основе унифицированных модулей (разнотипные роботы).
Промышленные роботы, построенные на базе одной принципиальной компоновочной схемы. В этом случае различные модификации получают за счет изменения взаимного расположения основных модулей, применения дополнительных кинематических модулей, различных типов приводов или систем управления и т. д. На рис. 176 показана система построения отдельных модификаций агрегатной гаммы ПР, обслуживающих литейные цехи с поточным характером производства или станки в условиях массового и крупносерийного производства. Всего эта гамма включает 24 модификации, различающиеся числом степеней подвижности (2-6), формами рабочих зон, комбинациями и расположением стыкуемых сборочных единиц. Например, модуль 1, обеспечивающий перемещение по координатам r, α1, α2, и модуль 2, осуществляющий движение по координате z, используют в четырех модификациях, а модули 3, 4 только в двух. ПР этой гаммы имеют грузоподъемность 40 кг, гидравлический привод. Система управления - цикловая. Метод программирования перемещений - по упорам, погрешность позиционирования ±2,0 мм.
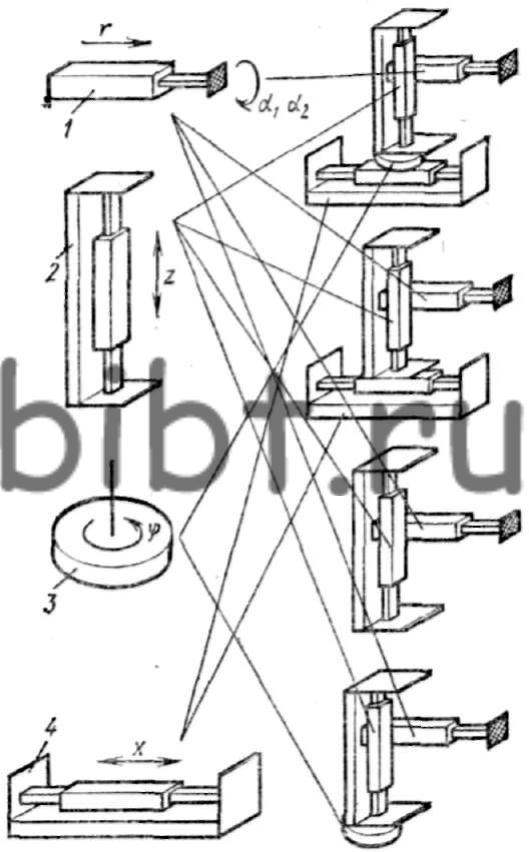
Рис. 176. Схема построения отдельных модификаций агрегатной гаммы промышленных роботов
Промышленные роботы, построенные по различным компоновочным схемам на основе унифицированных модулей, обеспечивают разнообразие размеров и форм зон обслуживания. Для массового и крупносерийного производства такие ПР делают упрощенными с цикловыми системами ПУ; для серийного производства используют промышленные роботы широкого назначения, применяемые для выполнения сложных операций. Агрегатная гамма роботов упрощенного типа грузоподъемностью до 6 кг (рис. 177) строится на базе модулей линейного и углового перемещений с пневматическим приводом. В этой гамме можно комплектовать до 50 типоразмеров ПР. Число степеней подвижности 2-7. Система управления - цикловая, способ программирования - по упорам. Погрешность позиционирования ±0,1... 0,5 мм в зависимости от набора модулей.
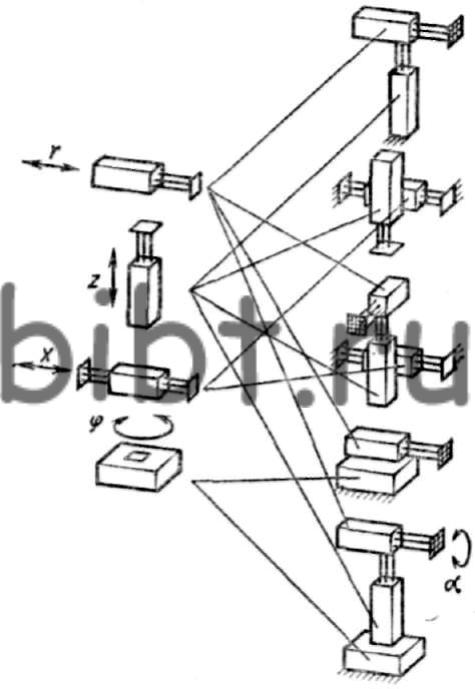
Рис. 177. Схема построения агрегатной гаммы упрощенных роботов