
| Главная |
| Поиск по сайту |
Адрес этой страницы' ?>
<<Предыдущая страница Оглавление книги Следующая страница>>
§ 4. ПРОМЫШЛЕННЫЙ РОБОТ СМ40Ф2.80.01. Кинематическая схема.
Промышленный робот с программным управлением предназначен для загрузки деталей типа тел вращения в станках с горизонтальной осью шпинделя. Обширная рабочая зона площадью более 30 м2 позволяет обслуживать группу станков при линейном или линейно-параллельном (в два ряда) расположении. Привод промышленного робота - электрогидравлический шаговый. Система координат - угловая. Промышленные роботы комплектуется быстросменными широкодиапазонными самоцентрирующими захватными устройствами. Имеется специальный датчик для определения положения заготовок на позициях вспомогательных устройств. Предусмотрено устройство светозащиты, обеспечивающее безопасность эксплуатации оборудования.
Техническая характеристика промышленного робота СМ40Ф2.80.01. Грузоподъемность 40 кг; число степеней подвижности (без захвата) 4; число захватных устройств 1; наибольший диаметр и длина транспортируемых заготовок соответственно 250 и 1200 мм; максимальные линейные перемещения 1900 мм; углы поворота плеча и локтя 90°, кантования захватного устройства 180°; максимальная скорость перемещений рабочих органов: каретки 0,8 м/с; плеча и локтя 0,6 м/с, кантования захватного устройства 0,5 м/с.
Система управления - позиционная типа УПМ-331. Число управляемых от устройства ЧПУ координат (всего/одновременно) 3/2; программирование происходит методом обучения. Точность позиционирования ±1,00 мм. Программоноситель - накопитель на магнитной ленте с объемом хранимой информации 600 К бит. Имеется цифровая индикация номера зоны и номера кадра, а также световая сигнализация.
Основные механизмы, движения и кинематика. Промышленный робот СМ40Ф2.80.01 (рис. 178) имеет портальную компоновку. Опорная система 1 представляет собой траверсу, состоящую из двух секций монорельс длиной 6000 мм каждая, закрепленную на трех колоннах. К траверсе крепятся рельсы прямоугольного сечения, по которым перемещается каретка 2. Две группы роликов (каждая из трех штук) охватывают верхний рельс и пара роликов опирается с боков на нижний рельс. К базовой поверхности каретки крепится рука и гидропанель. Рука выполнена сварной и состоит из плеча 3 и локтя 4. На базовый фланец локтя устанавливается головка 5 робота, на переднем конце шпинделя которой имеется байонетный зажим для крепления захватного устройства.
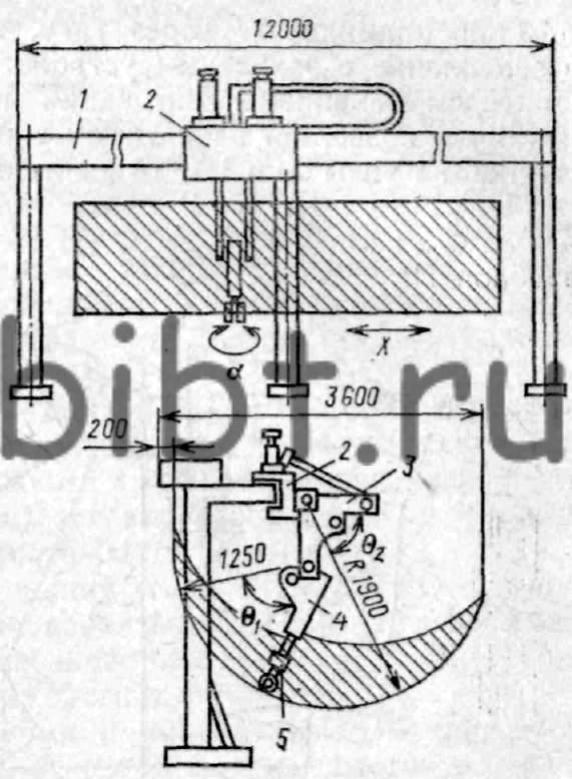
Рис. 178. Общий вид и рабочая зона промышленного робота СМ40Ф2.80.01
Привод каретки 10 (рис. 179) осуществляется от шагового двигателя M1 типа ШД5-Д1 с гидроусилителем крутящих моментов через редуктор z1-z2, z3-z4 и реечную передачу с реечным колесом z5. Рейка расположена на монорельсе 11. Вокруг оси 9, закрепленной на каретке, качается плечо 7 от электрогидравлического шагового привода М2 через редуктор z6-z7 и пару винт-гайка качения 12. Вокруг неподвижной оси 6 качается от шагового электродвигателя М3 типа ШД5-Д1 с гидроусилителем локоть 5 через зубчатую пару z8-z9 и винт - гайку качения 8. Электромагнитные муфты М1 и М2 обеспечивают торможение при прекращении подачи электрического тока.
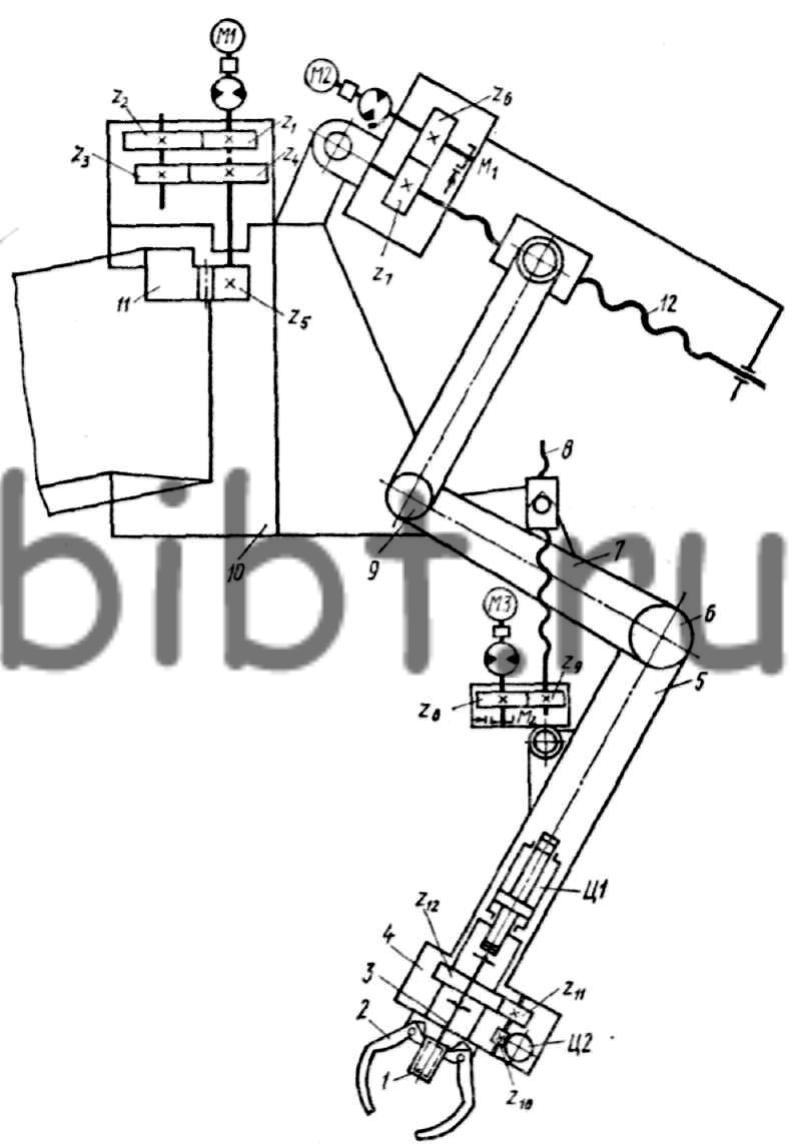
Рис. 179. Кинематическая схема промышленного робота СМ40Ф2.80.01
Гидроцилиндр Ц1 через тягу, передний конец которой входит в зацепление с захватным устройством 2, осуществляет его зажим. Приводом механизма кантования является гидроцилиндр Ц2. Этот механизм позволяет захватному устройству поворачиваться соответственно на углы 90 и 180° относительно шпинделя 3 в зависимости от положения выдвижного упора, управляемого электромагнитом. Гидроцилиндр Ц2 вращает шпиндель головки и соответственно захватное устройство посредством шток-рейки и зубчатой пары z11-z12. Захватное устройство имеет две пары губок специального профиля, обеспечивающего центрирование заготовок с диаметрами, лежащими в диапазоне работы захвата. На губках, шарнирно закрепленных на корпусе нарезаны зубчатые сектора, и губки попарно зацепляются с двусторонними рейками 1. Зубчатые рейки связаны с цилиндром зажима Ц1.