
| Главная |
| Поиск по сайту |
Адрес этой страницы' ?>
<<Предыдущая страница Оглавление книги Следующая страница>>
§ 5. ПРОМЫШЛЕННЫЙ РОБОТ УМ160Ф2.81.01. Техническая характеристика.
Универсальный промышленный робот УМ160Ф2.81.01 с ПУ предназначен для группового обслуживания оборудования, в основном металлорежущих станков с горизонтальной осью шпинделя или горизонтальным столом. ПР производит установку-снятие деталей и их межстаночное транспортирование. Промышленный робот может обслуживать токарные, фрезерно-центровальные, шлифовальные, зубообрабатывающие и другие станки. Промышленный робот оснащен широкодиапазонными быстросменными хватными устройствами, возможна автоматическая смена захватных устройств.
Техническая характеристика робота УМ160Ф2.81.01. Грузоподъемность 160 кг; число захватных устройств 1, число обслуживаемых технологических единиц 4; число степеней подвижности 4; линейные перемещения X (при скорости 1,2 м/с) 16 000 мм; угловые перемещения θ1, θ2 (при скорости 30°/с) 90°, α (при скорости 90°/с) 90-180°.
Система управления - позиционная типа УПМ 331. От устройства ЧПУ управляются три координаты. Способ программирования - обучение. Погрешность позиционирования ±0,5 мм. Программоноситель - накопитель на магнитной ленте.
Основные механизмы, движения и кинематика. Промышленный робот УМ160Ф2.81.01 (рис. 180) имеет портальную конструкцию. Каретка 1 перемещается по монорельсу 2, состоящему из трех секций длиной 6000 мм каждая, закрепленных на четырех колоннах. Ролики каретки катятся по двум направляющим прямоугольного сечения, прикрепленным к монорельсу.
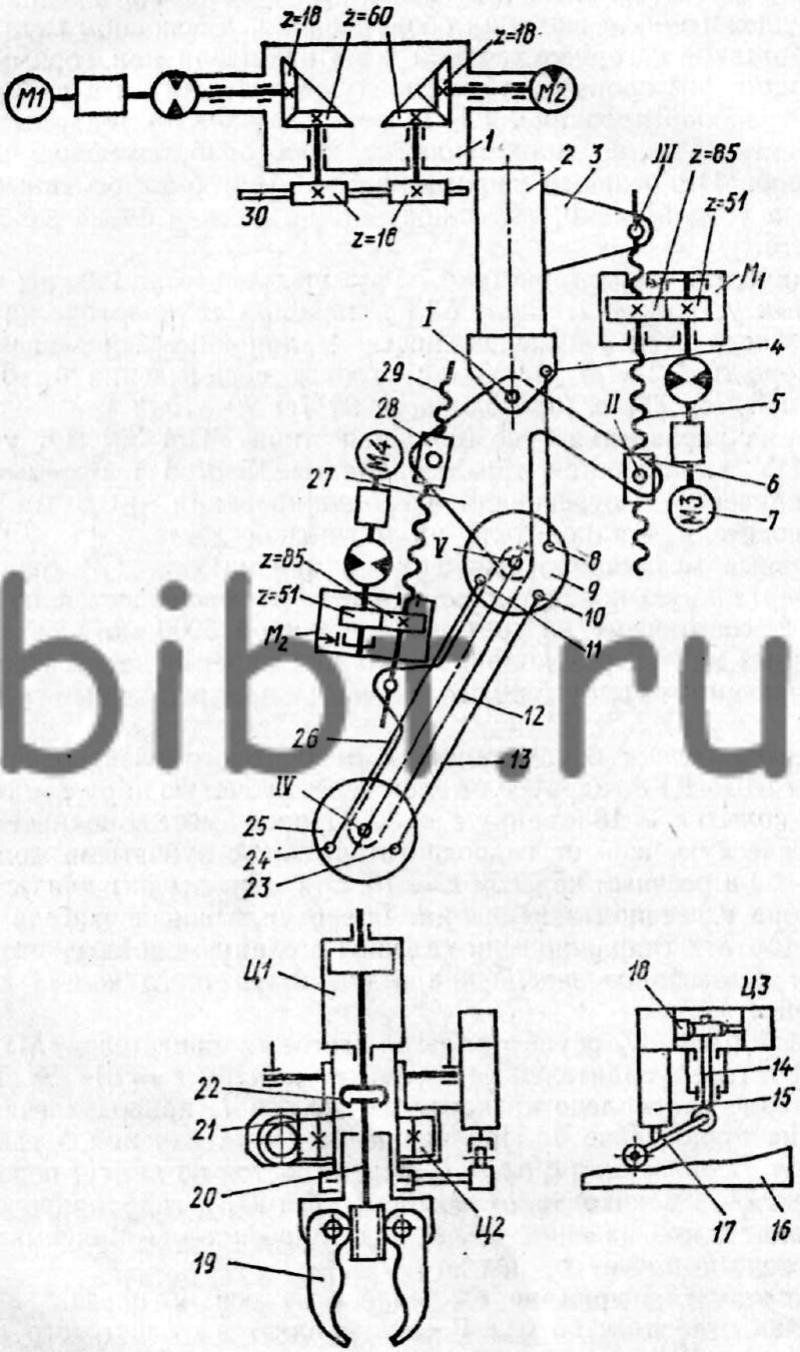
Рис. 180. Кинематическая схема робота УМ160Ф2.81.01
Привод каретки робота УМ160Ф2.81.01 осуществляется от шагового электродвигателя M1 типа ШД5-Д1 с гидроусилителем через зубчатую пару z = 18-60, реечное колесо z = 18 и рейку z = 30. Привод имеет дополнительную кинематическую цепь от гидродвигателя М2 с зубчатыми колесами z = 18-60 и реечным колесом z = 18. Эта цепь служит для устранения зазора в реечном зацеплении. Гидроусилитель двигателя M1 и гидромотор М2 гидравлически связаны в единую систему, что обеспечивает беззазорное зацепление ведущего реечного колеса z=18 c рейкой z = 30.
Привод плеча 27 осуществляется шаговым двигателем М3 типа ШД5-Д1 с гидроусилителем через зубчатую пару z =51-85. Плечо 27 шарнирно закреплено на каретке 1 на оси I, привод плеча установлен на кронштейне 3. При вращении винта качения 5 гайка 6, шарниром 11 связанная с плечом, перемещается по винту, поворачивая плечо 27. Кулачковая тормозная муфта М1 с гидроприводом запирает винт 5 при падении давления в гидросистеме. Максимальный угол поворота плеча составляет 90°.
Предплечье 12 шарнирно закреплено на оси V плеча. Поворот предплечья относительно оси V осуществляется от шагового двигателя М4 типа ШД5-Д1 с гидроусилителем через зубчатую пару z= 51-85 и винт-гайку качения z=29-28. Гайка 28 шарнирно закреплена на плече. Муфта М2 - кулачковая тормозная. Максимальный угол поворота предплечья 12 относительно плеча 27 составляет 90°, в исходном же положении звенья расположены под углом 30° друг к другу, что обеспечивает выгодную форму рабочей зоны. Головка 22 шарнирно крепится на диске 25 предплечья 12. Головка песет шпиндель 21, в котором закрепляются сменные захватные устройства 19. В корпусе головки расположен гидроцилиндр Ц1 привода движения захватов захватного устройства. Перемещение захватов происходит через тягу 20 с закрепленной на ней рейкой, находящейся в зацеплении с зубчатыми секторами привода захватов.
Ротация шпинделя 21 головки 22 на 90° и 180° осуществляется лопастным гидроцилиндром Ц2 через реечную передачу. Гидроцилиндр управляется следящим гидрораспределителем 15, щуп которого через рычаг 17 контактирует с кольцевым копиром 16, закрепленным на шпинделе 21 головки. Ось рычага 17 закреплена на тяге 14, которая опирается на ступенчатый шток 18 вспомогательного гидроцилиндра Ц3. В зависимости от положения штока ось рычага 17 может устанавливаться на один из трех уровней, что приводит к изменению положения щупа следящего гидрораспределителя 15 по отношению к копиру, и, соответственно, вызывает поворот лопастного гидроцилиндра.
Шарнирно-рычажный спрямительный механизм промышленного робота УМ160Ф2.81.01 крепится к руке и служит для сохранения вертикального расположения шпинделя головки и соответственно захватного устройства при любом положении звеньев руки. Механизм включает палец 4, жестко закрепленный на каретке, свободный диск 9, несущий пальцы 8, 10 и 11, а также диск 25, жестко соединенный с цапфой головки 22. На диске 25 закреплены пальцы 23 и 24. Пальцы 4 и 8 соединены рычагом 7, пальцы 10, 23 и 11, 24 соответственно связаны рычагами 13, 26. Образованные рычагами 7, 13, 26 и звеньями руки 27 и 12 шарнирные параллелограммы обеспечивают вертикальное положение шпинделя 21 головки.
Сенсорный модуль, которым оснащен промышленный робот УМ160Ф2.81.01, служит для поиска, опознавания, измерения и захватывания деталей типа тел вращения. Имеется электромеханический тактильный датчик (рис. 181, а) в виде штыря 4, перемещающегося в вертикальном направлении, Подпружиненное коромысло 6 закреплено на основании штыря 4. Перемещение штыря 4 и коромысла 6 фиксируется датчиками положения 5. Датчик используется следующим образом: захватное устройство промышленного робота перемещается над позициями ориентирующего магазина 1 на уровне, обеспечивающем контакт коромысла 6 с лежащей в позиции заготовкой 2. При совпадении оси датчика с плоскостью оси заготовки датчик дает сигнал в систему управления на перемещение руки на величину шага L и вверх и на взятие заготовки захватным устройством 3. Расстояние между осью захватного устройства и коромысла устанавливается равным шагу позиций магазина. Последовательность захвата заготовки показана на рис. 181, б. С помощью электролинейки можно измерить длину заготовки, установить положение захватного устройства относительно ее торцов и ввести соответствующую коррекцию в программу.
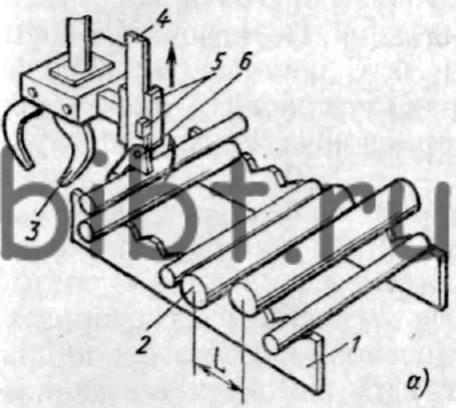
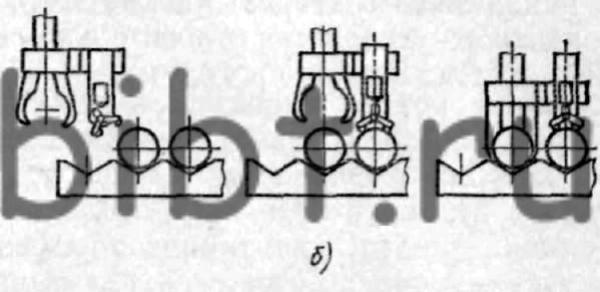
Рис. 181. Сенсорное оснащение ПР УМ160Ф2.81.01